

13. Условные обозначения подшипников на структурных схемах механизмов
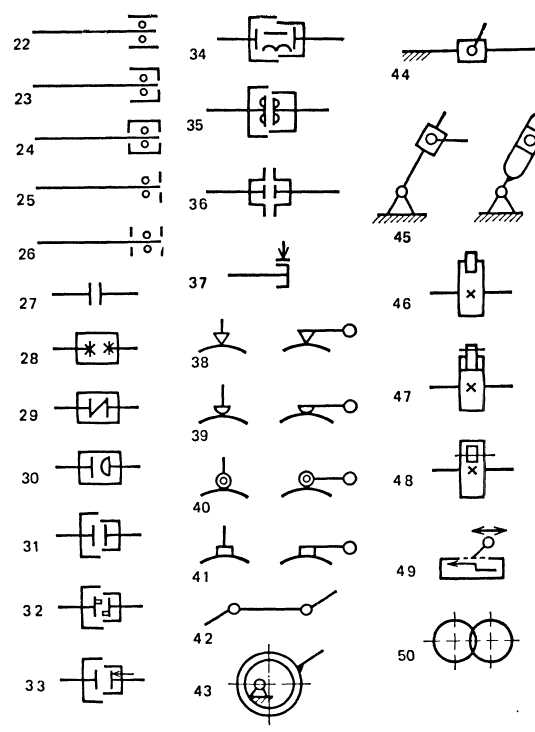
Рис. 20.39. Условные графические обозначения некоторых элементов кинема* тики; ГОСТ 2.770-68; СТ СЭВ 2519-80 (продолжение) 22—26 — подшипники качения (22 — радиальные; 23 — радиально-упорные односторонние; 24 — радиально-упорные двусторонние; 25 — упорные односторонние; 26 — упорные двусторонние), 27—36 — муфты (27 — общее обозначение без уточнения типа; 28 — нерасцепляемая (неуправляемая), глухая; 29 — то же, упругая; 30 — то же, компенсирующая;31 — сцепляемая, управляемая, общее обозначение; 32 сцепляемая механическая синхронная, например, зубчатая, 33 — асинхронная, например, фрикционная; 34 — сцепляемая электрическая, 35 — сцепляемая гидравлическая или пневматическая, 36 — автоматическая, самодействующая, общее обозначение); 37 — тормоз, общее обозначение без уточнения типа; 38 — толкатель (ведомое звено), заостренный; 39 — то же, дуговой, 40 — то же, роликовый, 41 — то же, плоский; 42—45 — звено рычажных механизмов двухэлементное (42 — кривошип, коромысло, шатун; 43 — эксцентрик, 44 — ползун, 45 — кулиса), 46—49 — храповые зубчатые механизмы (46 — с наружным зацеплением односторонние, 47 — с наружным зацеплением двусторонние; 48 — с внутренним зацеплением односторонние, 49 — с реечным зацеплением); 50 — мальтийские механизмы с радиальным расположением пазов у мальтийского креста, общее обозначение;
21., Кинематическая схема двухступенчатого зубчатого механизма (на примере).
Рис. 6 А, Б
Для двухступенчатых рядов зубчатых колес, образованных двумя цилиндрическими зубчатыми передачами (например, как на рис. 6А)
При ![]() применяют
двухступенчатые зубчатые передачи,
при
применяют
двухступенчатые зубчатые передачи,
при ![]() > 40
– трехступенчатые.
> 40
– трехступенчатые.
Передаточное отношение многоступенчатой передачи равно произведению частных передаточных отношений отдельных ступеней (простых механизмов).
Для ступенчатого механизма, изображенного на рис.1.2, передаточное отношение определяется по формуле:
![]() .
.
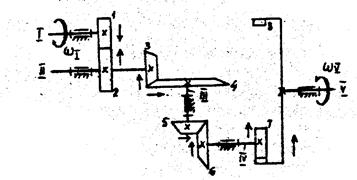
Рис.1.2
Вследствие
параллельности валов I и V найденному
передаточному отношению, как и в случае
одноступенчатой передачи, приписываем
знак. Его определяем по правилу стрелок.
В нашем случае величине ![]() должен
быть приписан знак "минус".
должен
быть приписан знак "минус".
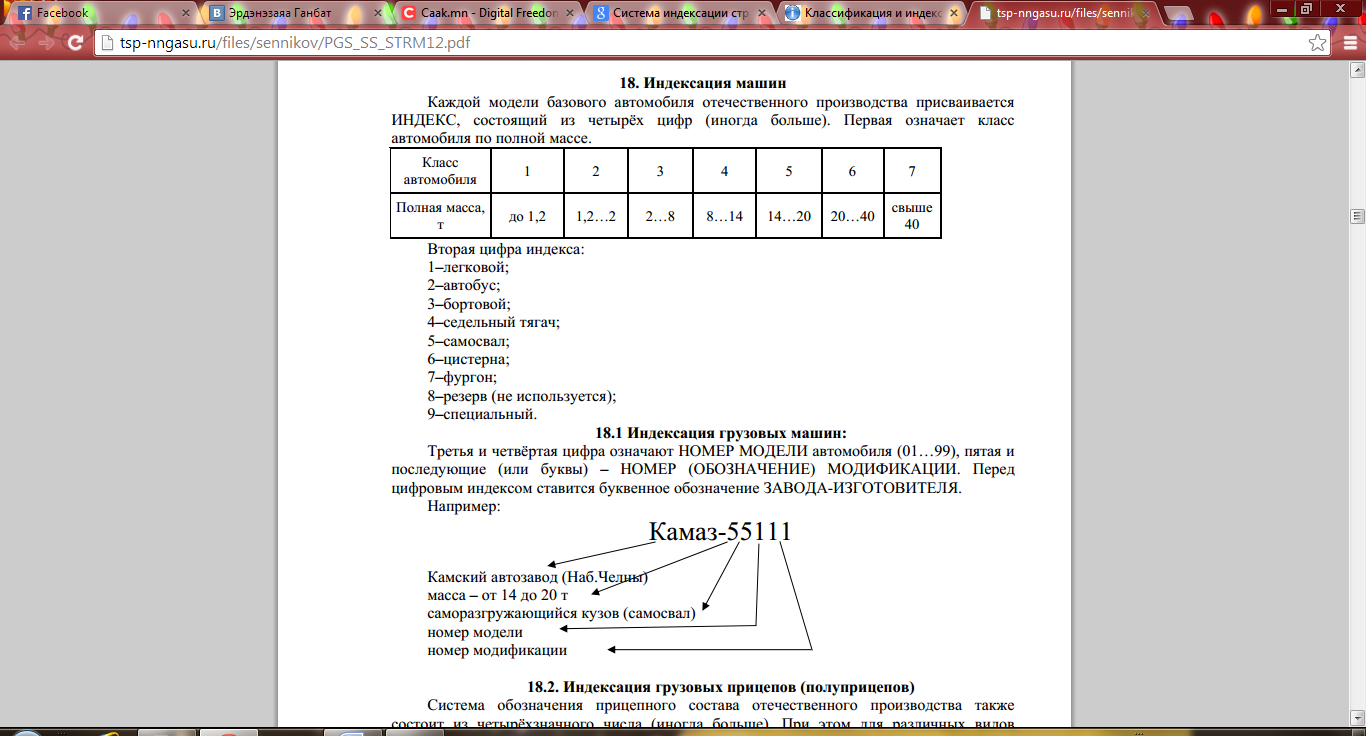
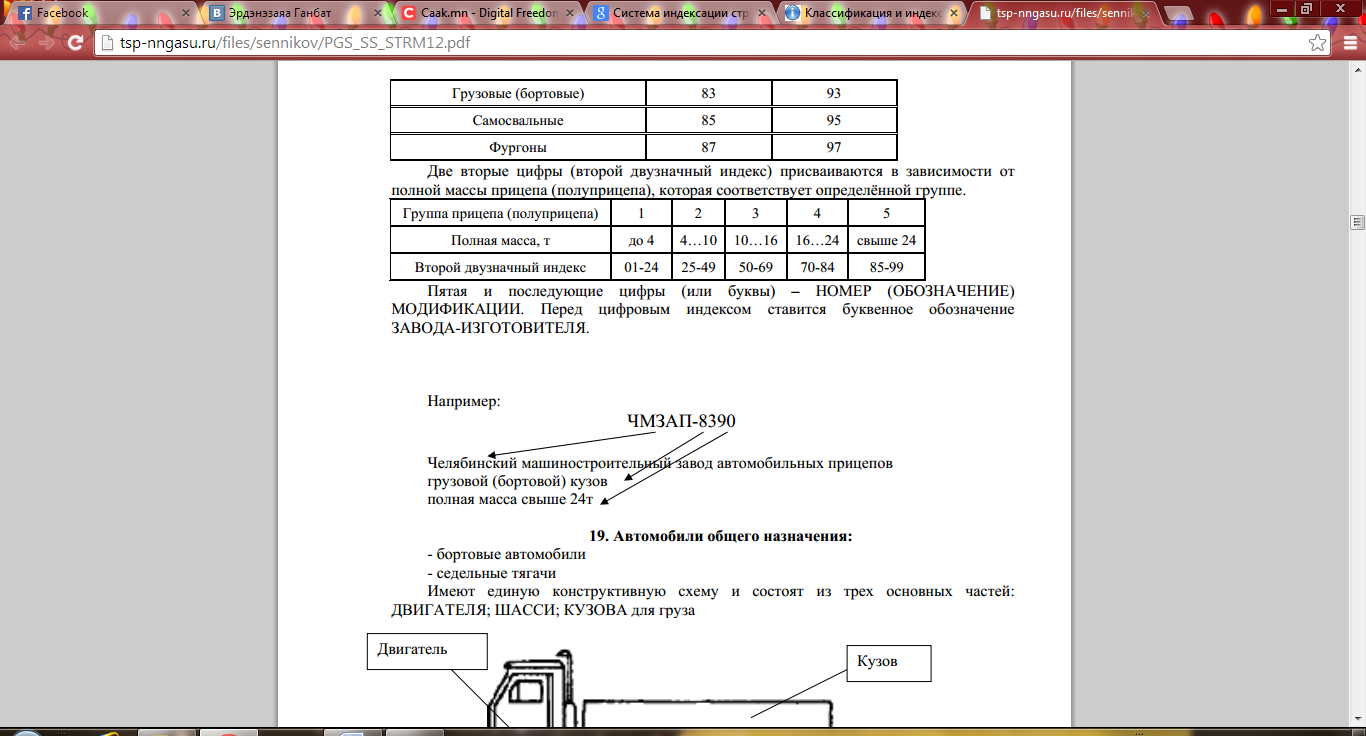
33. Система индексации строительных машин

37. Системы автоматики строительно-дорожных машин. Схема автоматизированного управления.
Автоматизированное управление (рис. б) часть операций технологического процесса осуществляется механизмами управления без участия человека. В этом случае сигналы преобразователей о нарушении технологического процесса принимаются приборами сигнализации и сервомеханизмами. Последние, воздействуя самостоятельно на механизмы управления, могут остановить действие рабочего органа или всей машины. Человек устраняет неисправности и повторного запуска машины в работу.

39. Общая структура строительной машины.
СМ состоит из сборочных единиц (элементов), выполняющих заданные функции в процессе ее работы, в т.ч.:
несущая рама (шасси) для размещения и закрепления на ней всех элементов СМ;
силовое оборудование (СО), из одного или нескольких двигателей;
рабочее оборудование (РО) для выполнения заданного технологического процесса: воздействия на перерабатываемый объект (материал, изделие, конструкция) и/или его перемещения в пространстве);
ходовое оборудование (ХО) для передвижения СМ и передачи ее веса и рабочих нагрузок на опорную поверхность, ХО есть у самоходных СМ, но отсутствует у переносных и стационарных СМ;
трансмиссия (передаточные механизмы), связывающая РО и ХО с СО;
системы управления (СУ):
# для пуска, останова и изменения режимов работы СО,
# для включения, выключения, регулирования скоростей, торможения и реверсирования передаточных механизмов и РО,
# для позиционирования элементов РО и ХО относительно несущей рамы СМ и объекта, на который направлено действие СМ;
система обеспечения функционального комфорта человека-оператора СМ (управление, защита от вредных воздействий и т.д.);
система защиты окружающей среды от вредного воздействия СМ (вибрации, шум, выхлопные газы и т.д.);
системы диагностики СМ (встроенные, переносные, элементы дистанционной диагностики).
Сборочные единицы (элементы) подавляющего большинства современных СМ унифицированы. Унифицированные элементы производятся, как правило, специализированными предприятиями. Эти предприятия могут поставлять однотипные элементы для СМ др. видов технологических машин, для различных типов транспортных средств и т.д.
Примеры СДМ производства компаний Hyundai Heavy Industries, Samsung-Volvo, Caterpillar и многих др.