

3.8. Пример статистической имитационной модели системы со случайными параметрами
Рассмотрим модель процесса самонаведения в вертикальной плоскости летательного аппарата (ЛА) с радиолокационным координатором на некоторый объект (цель), в условиях однократного воздействия помехи типа ложной цели. Целью моделирования является оценка точности системы.
Движение ЛА (в наиболее упрощенном виде) описывается линеаризованной системой дифференциальных уравнений [14]:
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() .
(3.33)
.
(3.33)
В уравнениях (3.33)
использованы следующие обозначения
переменн
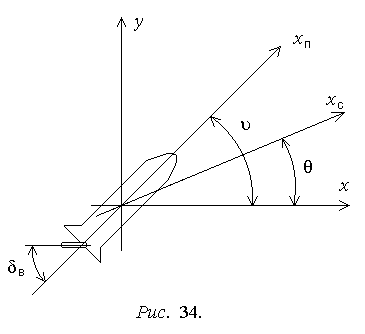
Постоянные коэффициенты и параметры модели: K,L,M,N - аэродинамические коэффициенты; Tрп,kрп - постоянная времени и коэффициент передачи рулевого привода; v - скорость ЛА; vцx,vцy - горизонтальная и вертикальная проекции скорости цели.
Сигнал управления ЛА формируется в виде =ст+сн, где ст=i1i2z - сигнал стабилизации; i1,i2 - коэффициенты передачи автопилота; сн=-kсн(к) - сигнал самонаведения по методу погони; kсн - коэффициент самонаведения; к - измеренный координатором угол наклона линии визирования цели.
Будем учитывать только детерминированные ошибки измерения, обусловленные наличием ложной цели.
При отсутствии ложной цели угол наклона линии визирования цели измеряется точно:
![]() .
.

При наличии ложной цели, если в пределах диаграммы направленности антенны координатора находятся обе цели (рис. 35,а), координатор на основе суммарного сигнала измеряет угловое положение некоторого эффективного центра отражения (ЭЦО):
![]() ,
,
![]() ,
yлц=const,
,
yлц=const,
где sц и sлц - интенсивности радиолокационного сигнала соответственно истинной и ложной целей.
После выхода за пределы диаграммы направленности одной из целей (разрешения целей) координатор измеряет соответственно угловое положение истинной цели (рис. 35,б) к=ц или ложной цели (рис. 35,в):
![]() .
.
Для построения модели процесса наведения с учетом действия рассматриваемой помехи дополним уравнения (3.33) моделью смены дискретных состояний системы управления, выделив их по признаку различия сигнала управления .
Множество состояний будет иметь вид X=(x1,x2,x3,x4),
где x1 - наведение на истинную цель: сн=-kсн(ц);
x2 - наведение на ЭЦО: сн=-kсн(эцо);
x3 - наведение на ложную цель: сн=-kсн(лц);
x4 - отсутствие сигнала самонаведения (координатор работает в режиме поиска цели): сн=0.
Логика смены состояний описывается графом на рис. 36,а и для случая однократного появления ложной цели иллюстрируется схемой на рис. 36,б.
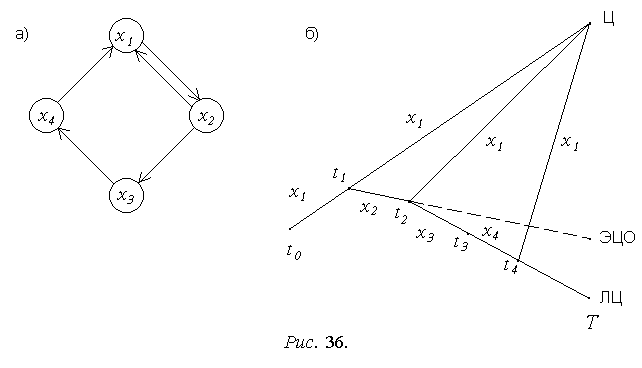
На рис. 36,б отмечены моменты времени: t0 - начала моделируемого процесса наведения, t1 - появления ложной цели, t2 - разрешения целей, t3 - селекции ложной цели и переключения координатора в режим поиска цели, t4 - повторного захвата на сопровождение истинной цели, T - окончания процесса наведения.
Таким образом, на интервале времени [t0;T] могут иметь место следующие последовательности состояний, или фаз движения системы:
u1: x1;
u2:
![]() ;
;
u3:
![]() ;
;
u4:
![]() ;
;
u5:
![]() .
.
Переход из x1 в x2 возможен только в момент времени t1 и происходит с вероятностью p12. Момент t2 и соответствующий ему переход определяются изменением текущих координат моделируемых объектов. Интервалы времени t3-t2 и t4-t3 - непрерывные случайные величины, распределенные по экспоненциальному закону.
Таким образом, построенная модель реализует схему ДРС (подразд. 2.2). Отметим также, что система (3.33) после подстановки в правую часть четвертого уравнения выражений для оказывается нестационарной.
Точность системы характеризуется величиной конечной ошибки :
=(T)=yц(T)-yла(T), (3.34)
где T определяется из условия D(T)=0.
Все параметры модели, включая начальные условия, можно разбить на четыре группы:
1. Детерминированные (фиксированные) параметры, характеризующие элементы системы управления ЛА: K, L, M, N, Tрп, kрп, v, i1, i2, kсн, sц, .
2. Связанный параметр, определяемый в процессе моделирования: t2-t1.
3. Случайные параметры, характеристики распределения которых определяются предшествующими процессами в системе: t0, начальные условия 0, 0, z0, в0, yла0, D0, для уравнений (3.33), интервалы и . В эту группу включим также дискретный параметр с двумя возможными значениями (0 при отсутствии перехода в x2 в момент t1 и 1 при наличии такого перехода).
4. Неопределенные параметры, характеризующие исследуемые условия применения системы: yц0, vцx, vцy, yлц, sлц, t1.
Таким образом, модель является стохастической, и для показателя качества (3.34) могут быть определены только средние характеристики.
Ограничимся оценкой математического ожидания конечной ошибки системы.
В условиях случайности и неопределенности ряда параметров в общем случае могут быть получены условные оценки m, соответствующие конкретным значениям неопределенных параметров и конкретным законам распределения случайных параметров модели. Рассматриваемая модель нестационарной ДРС допускает только имитационное моделирование.
Пусть для моделируемой ситуации заданы:
- фиксированные значения yц0, vцx, vцy, yлц, sлц, t1;
- законы распределения случайных параметров, которые считаются статистически независимыми:

P(=1)=p12, P(=0)=1-p12;
- для остальных случайных параметров фиксированные значения.
Процедура статистического имитационного моделирования и оценки m для заданной ситуации будет выглядеть следующим образом.
Должны быть получены n реализаций процесса наведения, начиная с t0, путем численного интегрирования на ЦВМ модели (3.33) с учетом смены дискретных состояний системы (серия опытов объемом n).
Перед каждым i-м опытом с помощью стандартного генератора случайных чисел , распределенных по равномерному закону в интервале [0;1], "разыгрываются" значения случайных параметров модели:
(D0)i=D0min+(D0max - D0min)4i-3,
![]() ,
,
![]() ,
,
![]()
и рассчитывается
значение
![]() .
.
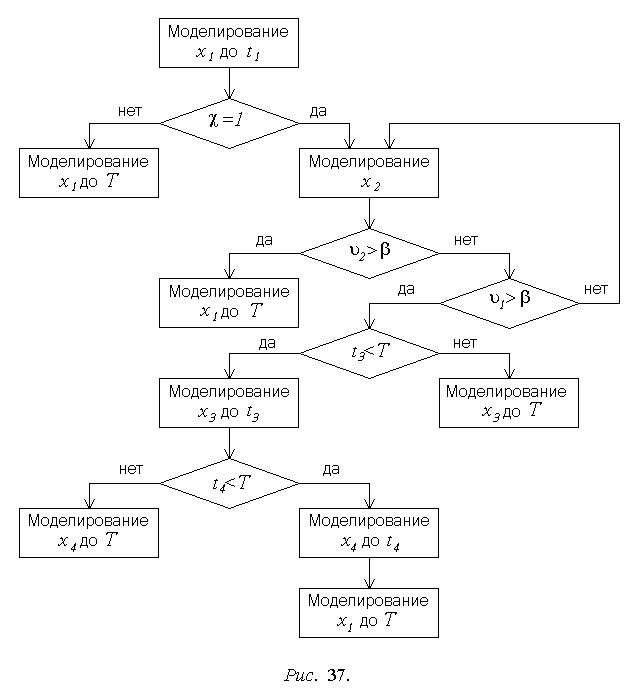
Укрупненная
блок-схема получения i-й реализации
процесса наведения представлена на
рис. 37. В процессе моделирования
определяется (t2)i,
как момент, когда в первый раз окажется
выполнено одно из условий: 1>
или 2>
(рис. 35,б,в), - и определяется дальнейшее
развитие процесса: переход
![]() при 2>
или переход
при 2>
или переход
![]() при 1>.
После определения (t2)i
раcсчитываются (t3)i=(t2)i+(3)i
и (t4)i=(t3)i+(4)i.
В качестве результата i-го
опыта регистрируется i
= yц(Ti)
- yла(Ti)
при 1>.
После определения (t2)i
раcсчитываются (t3)i=(t2)i+(3)i
и (t4)i=(t3)i+(4)i.
В качестве результата i-го
опыта регистрируется i
= yц(Ti)
- yла(Ti)
Оценка математического ожидания конечной ошибки системы определяется как
![]()
Необходимое количество опытов n определяется с учетом требуемой точности результата по (3.19) или на основе соответствующего итерационного алгоритма.
Отметим в заключение две особенности реализации такой модели методом статистического моделирования:
- необходимое количество опытов (имитируемых реализаций процесса наведения) не зависит от количества учитываемых случайных параметров модели;
- если требуется оценить показатель качества системы для различных ситуаций, отличающихся исходными данными (разные фиксированные значения параметров или законы распределения), рассмотренная процедура в полном объеме, включая серию опытов, должна быть повторена для каждого варианта исходных данных.