

76. Регулирование частоты вращения двигателей постоянного тока с параллельным возбуждением.
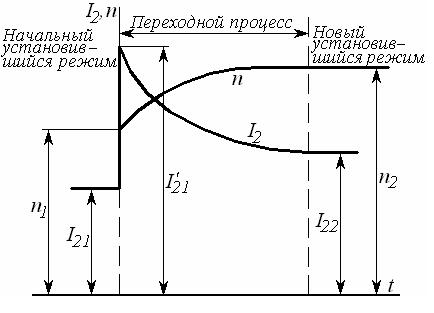
Одним из основных достоинств двигателей постоянного тока является возможность плавного регулирования частоты вращения в широких пределах. В общем случае в цепь якоря двигателя может быть включен регулировочный реостат Rрг. Тогда из формулы п=[U–IЯ(RЯ+Rрг)]/(сеФ) следует, что частоту вращения двигателей постоянного тока можно регулировать: а) изменением напряжения сети U; б) изменением падения напряжения в сопротивлениях цепи якоря IЯ(RЯ+Rрг); в) изменением потока возбуждения, а следовательно, изменением тока возбуждения IЯ. Первый способ возможен только в специальных установках, допускающих регулирование напряжения сети U. Реостат Rpг в цепи якоря должен быть подобран так, чтобы можно было регулировать частоту вращения в желаемых пределах. Предположим, что напряжение сети и ток возбуждения остаются постоянными, т.е. U=const и IЯ=const, кроме того, статический момент МСТ=М0+М2 не зависит от частоты вращения двигателя. При выведенном реостате Rpг установившийся режим работы двигателя характеризуется вращающим моментом М2, частотой вращения п1, и током в цепи якоря I21. Сразу же после введения регулировочного реостата Rpг частота вращения и противо-э.д.с. остаются без изменения вследствие значительного момента инерции якоря, а ток в цепи якоря уменьшается до значения I21'. Соответственно уменьшается и вращающий момент двигателя. Превышение нагрузочного момента над вращающим моментом приводит к снижению частоты вращения якоря, уменьшению противо-э.д.с. и увеличению тока в цепи якоря (рисунок 1). Новое значение тока I22 и частота вращения п2 устанавливаются при равенстве вращающего момента двигателя и нагрузочного момента приводимого им во вращение механизма. При постоянном токе возбуждения и нагрузочном моменте М2 установившееся значение тока в цепи якоря I22= I21 и частота вращения якоря n2=п1[U–I21(RЯ+Rpг)]/(U–I21RЯ). Подведенная к двигателю мощность Р1=U(IЯ+IВ) в установившихся режимах сохраняется неизменной.
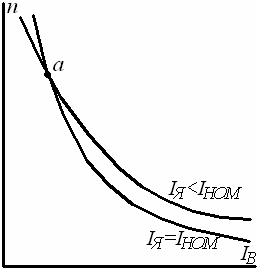
Полезная мощность Р2=М2ω=М22πп2/60 уменьшается пропорционально частоте вращения. Недостатки этого способа регулирования частоты вращения – малая экономичность и ухудшение условий охлаждения, поэтому его применяют, главным образом, для регулирования частоты вращения двигателей малой мощности. Если двигатель работает в установившемся режиме при неизменном напряжении на зажимах якоря и токе в обмотке возбуждения, то для необходимого вращающего момента М2 по соответствующим рабочим характеристикам могут быть определены частота вращения п1 ток I21 в цепи якоря и вычислена противо-э.д.с. Е21. При уменьшении тока возбуждения до значения IВ2 уменьшается магнитный поток. Вследствие значительного момента инерции якоря частота вращения его сразу же после изменения тока возбуждения остается прежней, противо-э.д.с. уменьшается до значения Е21' пропорционально магнитному потоку, ток в цепи якоря увеличивается до значения I21'=(U–Е21')/RЯ. Так как падение напряжения в цепи якоря составляет небольшую часть напряжения сети, то относительное увеличение тока (I21'–I21)/I21=(Е21–Е21')/(U–Е21)=(Е21–Е21')/IЯRЯ значительно превосходит относительное уменьшение магнитного потока. Это приводит к увеличению вращающего момента и к ускорению вращения якоря. Противо-э.д.с. в обмотке якоря увеличивается, ток уменьшается, пока не наступит равновесие между вращающим моментом двигателя и нагрузочным моментом приводимого им во вращение механизма при новых установившихся значениях тока I22 и частоте вращения п2 (рисунок 1). Подведенная к двигателю мощность Р2=U(IЯ+IВ) и полезная мощность P2=M22πп/60 увеличиваются в одинаковой мере, следовательно, к.п.д. двигателя при этом способе регулирования частоты вращения практически не изменяется. Зависимость частоты вращения п от величины тока возбуждения IВ выражается регулировочной характеристикой двигателя п=f(IВ) при IЯ=const и U=const. На рисунке 2 представлены две регулировочные характеристики двигателя, снятые при различных значениях тока якоря: при IЯ<IНОМ и при IЯ=IНОМ. Из этих характеристик видно, что при малом значении тока возбуждения, а тем более при обрыве цепи возбуждения IВ=0 частота вращения неограниченно возрастает, что приводит к «разносу» двигателя.