

31.Регулирование частоты вращения трехфазных асинхронных двигателей с фазным ротором.
Регулирование частоты вращения асинхронных двигателей В ряде специальных установок асинхронные машины с фазными роторами используются в качестве преобразователей частоты, для изменения фазы (фазовращатели) и для изменения напряжения (индукционные регуляторы). Одним из недостатков АД является неэкономичное регулирование частоты вращения. Частота вращения АД np = nc (I - s) =(1 — s) при постоянном моменте сопротивления зависит от скольжения и частоты вращения поля. Изменение скольжения может быть достигнуто либо увеличением сопротивления цепи ротора, либо изменением потока. Первый способ применим лишь для АД с фазным ротором. Он дает возможность регулировать частоту вращения в широком диапазоне (практически от s = 1 до s = sHOM), но не экономичен, так как в дополнительно введенных в цепь обмотки ротора резисторах возникают большие потери от полного тока ротора. Изменение частоты вращения поля пс достигается либо регулированием частоты тока питания, либо изменением числа полюсов обмотки статора. Регулирование изменением частоты тока питания в последние годы получает все большее распространение в связи с развитием и совершенствованием тиристорных преобразователей. Основным недостатком данного метода наряду с высокой стоимостью самого преобразователя, некоторым снижением надежности работы всей установки и увеличением ее габаритов является несинусоидальность тока на выходе преобразователя, отражающаяся на технических показателях АД. Регулирование частоты вращения путем изменения числа полюсов статора широко распространено во многих приводных установках. Обмотки АД с переключением числа пар полюсов дают возможность ступенчатого (две, три или четыре ступени) регулирования частоты вращения. Многоскоростные АД применяются во многих промышленных приводах и выпускаются электромашиностроительными заводами как модификации основных серий машин общего назначения. Основным недостатком данного метода является невозможность плавного регулирования и меньшее, чем в обычных АД, использование активного объема машины: габаритные размеры многоскоростных АД всегда больше, чем односкоростных тех же мощности и частоты вращения. В некоторых установках применяют способ регулирования частоты вращения введением добавочной ЭДС в цепь фазного ротора. Источником добавочной ЭДС, частота которой должна быть равна частоте тока ротора (/2 = s/j), может служить электромашинный или тиристорный преобразователь, частота на выходе которого определяется частотой вращения регулируемой машины. Другие возможные методы регулирования частоты вращения АД не получили распространения.
32.Двухклеточный асинхронный двигатель.
Еще лучшими пусковыми свойствами обладают асинхронные двигатели с двумя короткозамкнутыми клетками на роторе (рис.1): рабочей клеткой 1, стержни которой расположены в нижнем слое, и пусковой клеткой 2, стержни которой расположены в верхнем слое, ближе к воздушному зазору. Стержни пусковой клетки обычно выполняют из латуни или бронзы — материалов, обладающих более высоким, чем у меди, активным
сопротивлением. Индуктивное сопротивление рассеяния пусковой клетки невелико, так как ее стержни расположены вблизи воздушного зазора и к тому же с двух сторон имеют воздушные щели (рис.1). Стержни рабочей клетки выполняют из меди, и по сравнению со стержнями пусковой клетки они имеют большее сечение. Это обеспечивает рабочей клетке малое активное сопротивление. Но зато индуктивное сопротивление рабочей клетки больше, чем у пусковой, особенно в начальный период пуска, когда частота тока в роторе сравнительно велика (f2≈f1).
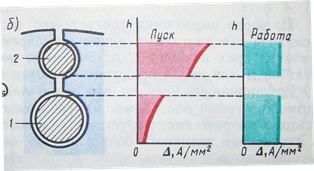
Рис.1 Двухклеточный ротор: распределение плотности тока в рабочей и пусковой клетках при пуске и работе двигателя
В момент пуска двигателя ток ротора проходит в основном по верхней (пусковой) клетке, обладающей малым индуктивным сопротивлением. При этом плотность тока в стержнях пусковой клетки намного больше плотности тока в стержнях рабочей клетки (рис.1). Повышенное активное сопротивление этой клетки обеспечивает двигателю значительный пусковой момент при пониженном пусковом токе. По мере увеличения частоты вращения ротора уменьшается частота тока в роторе, при этом индуктивное сопротивление рабочей клетки уменьшается, и распределение плотности тока в стержнях пусковой и рабочей клеток становится почти одинаковым. В итоге происходит перераспределение вращающего момента между клетками: если в начальный период пуска момент создается главным образом токами пусковой клетки, то по окончании периода пуска вращающий момент создается в основном токами рабочей клетки.
Так как активные сопротивления клеток ротора неодинаковы, то зависимость M = f(s) этих клеток изображается разными кривыми (рис 15.9). Максимальное значение момента пусковой клетки вследствие ее повышенного активного сопротивления смещено в сторону скольжений, близких к единице. Вращающие моменты от обеих клеток направлены в одну сторону, поэтому результирующий момент двигателя равен сумме моментов пусковой Мп.к. и рабочей Мраб.к. клеток М= Мп.к+ Мраб.к.

Двигатели с двумя клетками на роторе по сравнению с асинхронными двигателями обычной конструкции имеют повышенную стоимость, что объясняется сложностью конструкции.