

28. Регулирование частоты вращения трехфазных асинхронных двигателей с короткозамкнутым ротором (изменение числа пар полюсов).
Регулирование
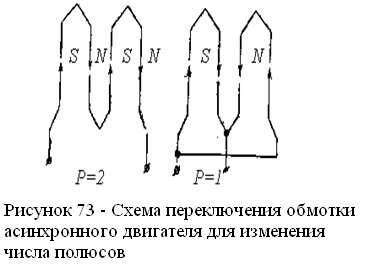
переключением числа полюсов, как это
следует из формулы
![]() ,
позволяет изменить скорость вращения
поля статора, а значит, и скорость
вращения ротора. Наиболее просто изменять
число полюсов для короткозамкнутых
двигателей в отношении 1:2. В этом случае
обмотка каждой фазы статора выполняется
в виде двух одинаковых секций. При
последовательном соединении секций
(рисунок 73) число пар полюсов р=2.
Параллельное соединение секций дает
р=1. Такой двигатель называется
двухскоростным. Практически изменение
числа полюсов статора производится
переключением со звезды на двойную
звезду или с треугольника на двойную
звезду. При этом в первом случае по
условиям полного использования двигателя
по нагреву регулирование должно
производиться при постоянном моменте
нагрузки, а во втором - при постоянной
мощности. Если на статоре двигателя
уложить две отдельные обмотки (каждую
с переключением числа пар полюсов), то
получим четырехскоростной двигатель.
В трехскоростном двигателе одна из
обмоток не имеет переключения числа
пар полюсов. Многоскоростные двигатели
наиболее целесообразно применять в
механизмах, не требующих плавного
регулирования скорости (некоторые
металлорежущие станки, вентиляторы и
насосы, работающие с разными режимами
и т.д.)
,
позволяет изменить скорость вращения
поля статора, а значит, и скорость
вращения ротора. Наиболее просто изменять
число полюсов для короткозамкнутых
двигателей в отношении 1:2. В этом случае
обмотка каждой фазы статора выполняется
в виде двух одинаковых секций. При
последовательном соединении секций
(рисунок 73) число пар полюсов р=2.
Параллельное соединение секций дает
р=1. Такой двигатель называется
двухскоростным. Практически изменение
числа полюсов статора производится
переключением со звезды на двойную
звезду или с треугольника на двойную
звезду. При этом в первом случае по
условиям полного использования двигателя
по нагреву регулирование должно
производиться при постоянном моменте
нагрузки, а во втором - при постоянной
мощности. Если на статоре двигателя
уложить две отдельные обмотки (каждую
с переключением числа пар полюсов), то
получим четырехскоростной двигатель.
В трехскоростном двигателе одна из
обмоток не имеет переключения числа
пар полюсов. Многоскоростные двигатели
наиболее целесообразно применять в
механизмах, не требующих плавного
регулирования скорости (некоторые
металлорежущие станки, вентиляторы и
насосы, работающие с разными режимами
и т.д.)
29 Введение сопротивления в цепь ротора. Первые два способа регулировки скорости вращения асинхронного двигателя требуют или специального исполнения двигателя, или наличия специального преобразователя частоты и поэтому широкого распространения не получили1. Третий способ регулировки скорости вращения асинхронных двигателей состоит в том, что во время работы двигателя в цепь обмотки ротора вводят сопротивление регулировочного реостата.
С увеличением активного сопротивления цепи ротора возрастает величина скольжения S, соответствующая заданному значению вращающего момента М (величина вращающего момента, развиваемого двигателем, равна моменту сопротивления на валу двигателя). Таким образом, вводя дополнительно активное сопротивление в цепь фазного ротора, мы увеличиваем скольжение S и, следовательно, снижаем скорость вращения ротора n. Такой способ регулирования применим только для асинхронных двигателей с фазным ротором. Регулировочный реостат включают в цепь ротора так же, как и пусковой реостат. Разница между пусковым и регулировочным реостатом состоит в том, что регулировочный реостат рассчитан на длительное прохождение тока. Для двигателей, у которых производится регулировка скорости вращения путем изменения сопротивления в цепи ротора, пусковой и регулировочный реостаты объединяются в один пускорегулировочный реостат. Недостатком этого способа регулирования является то, что в регулировочном реостате происходит значительная потеря мощности, тем большая, чем шире регулировка скорости вращения двигателя.
30. Регулирование частоты вращения трехфазных асинхронных двигателей с короткозамкнутым ротором (изменение напряжения).
Подводимым напряжением к трем фазам статора асинхронного двигателя можно изменять максимальный момент, не изменяя критического скольжения. Устройством для регулирования напряжения может быть, например, тиристорный регулятор; при этом в каждой фазе статора двигателя находится два встречно-параллельно включенных тиристора. Управляя углом включения тиристоров (фазовое управление), можно плавно менять действующее значение напряжения.
Максимальный момент при пониженном напряжении снижается пропорционально квадрату напряжения
МК,И = МК (UИ/UНОМ)2, (66)
где МК,И, МК - соответственно максимальные моменты, развиваемые двигателем при сниженном и номинальном напряжениях;
UИ, UНОМ - соответственно пониженное и номинальное напряжения.
Критическое скольжение, не зависящее от напряжения, остается неизменным. Не изменяется также и синхронная угловая скорость, которая зависит только от частоты питающего напряжения и числа пар полюсов двигателя.
Регулирование угловой скорости двигателя при этом способе происходит за счет уменьшения модуля жесткости механических характеристик и осуществляется вниз от номинальной угловой скорости. Плавность регулирования определяется плавностью изменения напряжения; при применении тиристорного регулятора напряжения угловая скорость регулируется бесступенчато.
Механические характеристики двигателя при регулировании напряжения на статоре приведены в разделе 2 на рисунке 61. Из этих характеристик следует, что пределы регулирования весьма ограничены даже при использовании вентиляторной нагрузки, но они могут быть существенно расширены в замкнутых системах электропривода.
Изменение подводимого напряжения можно также осуществлять с помощью дросселей насыщения за счет плавного изменения индуктивного сопротивления цепи статора в широких пределах. При включении дросселей в цепь статора асинхронного двигателя величина падения напряжения в обмотках переменного тока дросселей, а значит, и величина напряжения на зажимах статора двигателя определяются степенью подмагничивания дросселей. Чем больше ток управляющей обмотки iУ, тем меньше падение напряжения на дросселе и больше напряжение на зажимах статора.
В двигателях с фазным ротором дроссели насыщения можно включить и в цепь ротора.
Дроссельное регулирование скорости отличается простотой, надежностью. Однако из-за неэкономичности работы двигателя на низких скоростях и громоздкости самих дросселей этот метод регулирования применяется в основном для маломощных приводов.