

8.1. Модель корректирующего устройства, обеспечивающего настройку исходной системы на симметричный оптимум.

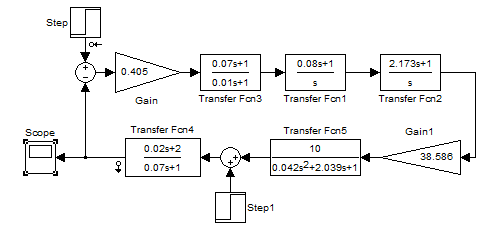
Рис.18. Модель скорректированной САУ
8.11) Здесь g равно минимальному значению 1, возмущающее воздействие z сначала равно своему минимальному значению 0. Результаты моделирования представлены на рис.19.

Рис.19. Результат моделирования при
Время
переходного процесса:

Колебательность: N=1
Время
регулирования:

Перерегулирование:

 8.12)
Здесь g
равно
максимальному значению 15,
возмущающее воздействие z
сначала равно своему минимальному
значению 0.
Результаты моделирования представлены
на рис.20.
8.12)
Здесь g
равно
максимальному значению 15,
возмущающее воздействие z
сначала равно своему минимальному
значению 0.
Результаты моделирования представлены
на рис.20.

Рис.20. Результат моделирования при
Время переходного процесса:
Колебательность: N=1
Время
регулирования:

Перерегулирование:

8.13)
Здесь g
равно
максимальному значению 1,
возмущающее воздействие z
сначала равно своему минимальному
значению 0,
а в момент времени t=2
c
 скачкообразно
изменяется до z=-8.
Результаты моделирования представлены
на рис.21.
скачкообразно
изменяется до z=-8.
Результаты моделирования представлены
на рис.21.

Рис.21.
Результат моделирования при
Время
переходного процесса:

Колебательность: N=2
Время
регулирования:

Перерегулирование:

 8.14)
Здесь g
равно
максимальному значению 15,
возмущающее воздействие z
сначала равно своему минимальному
значению 0,
а в момент времени t=2
скачкообразно изменяется до z=-8.
Результаты моделирования представлены
на рис.22.
8.14)
Здесь g
равно
максимальному значению 15,
возмущающее воздействие z
сначала равно своему минимальному
значению 0,
а в момент времени t=2
скачкообразно изменяется до z=-8.
Результаты моделирования представлены
на рис.22.

Рис.22.
Результат моделирования при
Время
переходного процесса:

Колебательность: N=2
Время регулирования:
Перерегулирование:


Рис.23. ЛАЧХ и ЛФЧХ для разомкнутой САУ, скорректированной на симметричный оптимум
Частота единичного усиления:

Частота сопряжения:


Запас
по фазе:

Запас
по амплитуде:

8.2. Модель регулятора упрощённой сау, обеспечивающей настройку исходной системы на симметричный оптимум.
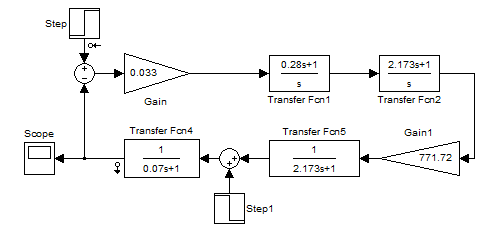
Рис.24. Модель упрощённой скорректированной САУ
8.21) Здесь g равно минимальному значению 1, возмущающее воздействие z сначала равно своему минимальному значению 0. Результаты моделирования представлены на рис.25.
Время
переходного процесса:

Колебательность: N=1
Время
регулирования:

Перерегулирование:

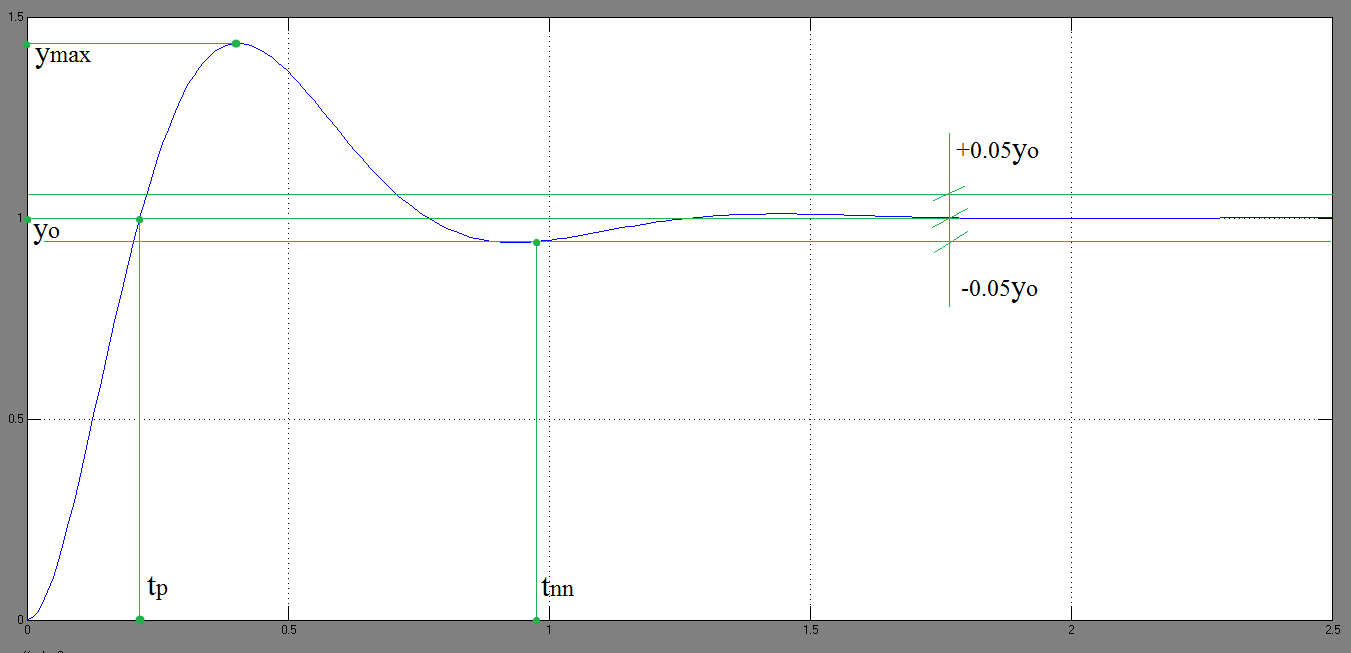

Рис.25. Результат моделирования при
8.22) Здесь g равно максимальному значению 15, возмущающее воздействие z сначала равно своему минимальному значению 0. Результаты моделирования представлены на рис.26.
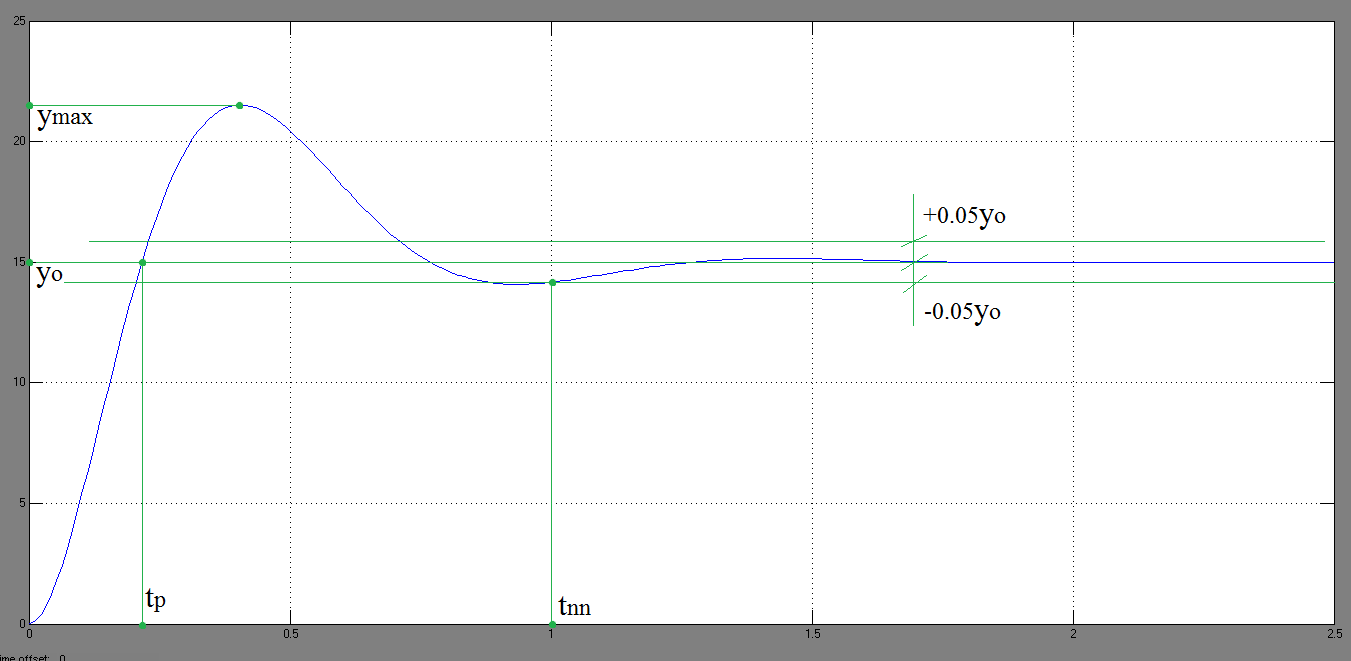 Рис.26.
Результат моделирования при
Рис.26.
Результат моделирования при
Время
переходного процесса:

Колебательность: N=1
Время
регулирования:

Перерегулирование:

 8.23)
Здесь g
равно
максимальному значению 1,
возмущающее воздействие z
сначала равно своему минимальному
значению 0,
а в момент времени t=4
скачкообразно изменяется до z=-8.
Результаты моделирования представлены
на рис.27.
8.23)
Здесь g
равно
максимальному значению 1,
возмущающее воздействие z
сначала равно своему минимальному
значению 0,
а в момент времени t=4
скачкообразно изменяется до z=-8.
Результаты моделирования представлены
на рис.27.

Рис.27. Результат моделирования при
Время
переходного процесса:

Колебательность: N=2
Время
регулирования:

Перерегулирование:

8.24) Здесь g равно максимальному значению 15, возмущающее воздействие z сначала равно своему минимальному значению 0, а в момент времени t=4 скачкообразно изменяется до z=-8. Результаты моделирования представлены на рис.28.
Время переходного процесса:
Колебательность: N=1
Время
регулирования:

Перерегулирование:


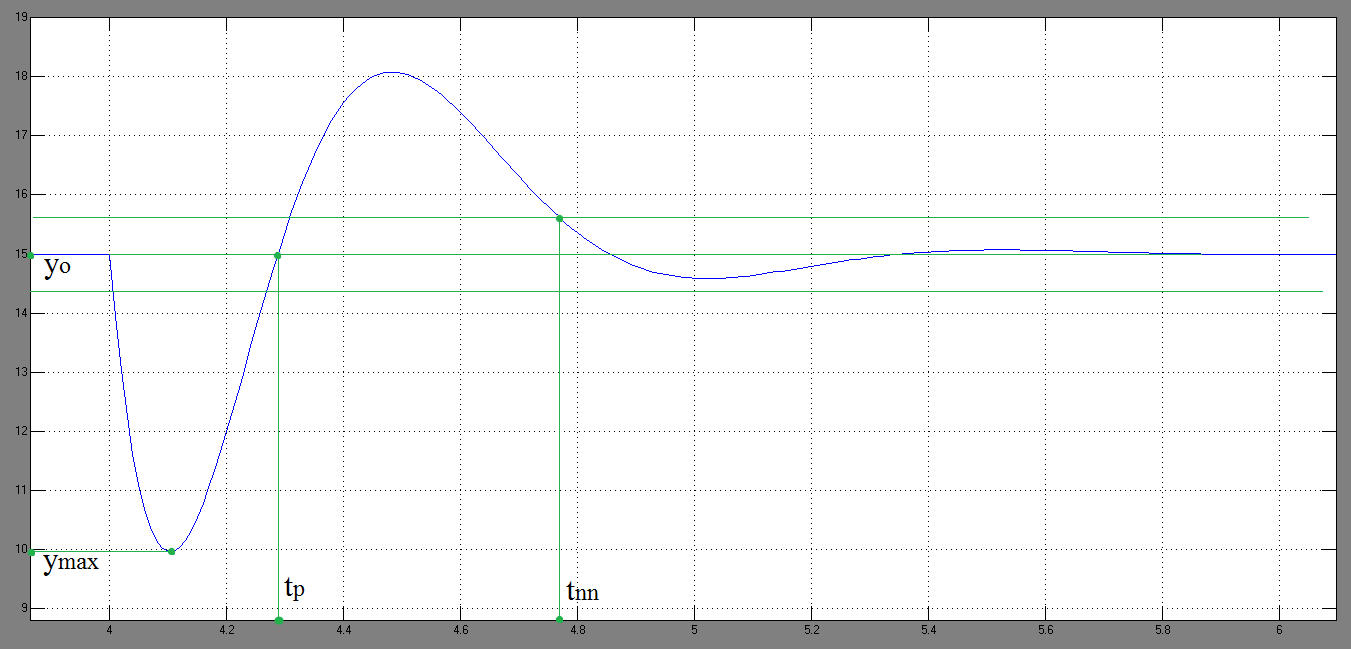
Рис.28. Результат моделирования при

Рис.29. ЛАЧХ и ЛФЧХ для разомкнутой упрощенной САУ, скорректированной на симметричный оптимум
Частота единичного усиления:

Запас
по фазе:

Запас по амплитуде