

5. Застосування контролера s7-200 для управління стрілочним електроприводом
Серед пристроїв залізничної автоматики і телемеханіки системиуправління об'єктами на станціях відіграють найважливішу роль. Швидкість обробки поїздів на станціях вирішальним чином визначає пропускну спроможність залізниць . Будь-яка система автоматики і телемеханіки складаєтьсяз окремих пов'язаних між собою елементів . Кожен елемент системивиконує певну функцію по якісному або кількісномуперетворенню енергії. Одним з найважливіших елементів станційних системє стрілочний привід , за допомогою якого здійснюється переклад ,замикання і контроль чотирьох положень гостряків стрілочного переводу -нормального ( плюсового ) , переведеного ( мінусового ) , проміжного(середнього ) і положення розрізу .
Стрілочний привід ( рис. 3.1 ) складається з реверсивного електродвигуна(Д); фрикційного механізму (Ф) , що забезпечує обмеження обертального моменту на валу електродвигуна щоб уникнути віджиму рамної рейкивістряком при попаданні між ними стороннього предмета і перевантаженнядвигуна , а також компенсації інерції руху пов'язаних з електродвигуном елементів редуктора в момент закінчення переведення стрілки ; редуктора( Р ), що є підсилювачем обертального моменту малопотужного електродвиг -гунів та перетворювачем обертового руху електродвигуна в поступальний рух робочих тяг гарнітури , пов'язаних з гостряками стрілки ;головного валу (Г) , передавального перекладне зусилля від редуктора до подальших каскадам силової передачі ; взрізного пристрою ( В) , що запобігає поломці стрілочного електроприводу при розрізу стрілки ; замикаючого механізму (З) , що забезпечує замикання гостряків в їх крайньому положенні; контрольного пристрою (К) - автопереключателя , що здійснює електричний контроль роботи стрілочного електроприводу у всіх режимах; робочих шиберів (Ш) , які переміщують дотепники стрілки з одного крайнього положення в інше , контрольних лінійок (Л) , пов'язаних з гостряками для управління контактами автоперемикача .Для управління стрілочним приводом використовується схема управління(СУ) , яка повинна забезпечувати можливість переведення стрілки і контролю її положення. Так як переклад стрілки і контроль її положення безпосередньо впливають на безпеку руху поїздів , відповідно в схемі управління стрілочним приводом повинні забезпечуватися всі умови безпеки .
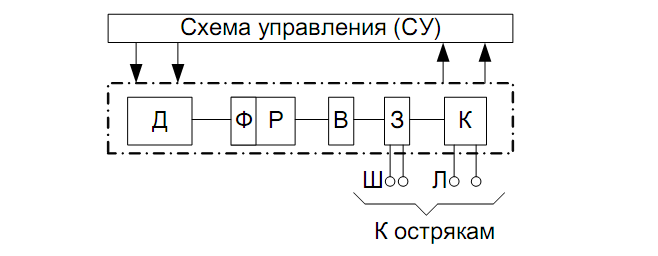
Рис.3.1Структурная схема стрілочного електропривода
У релейних системах електричної централізації , використовуваних на залізниці , застосовуються три різних схеми управління стрілочним приводом: двох - , чотирьох-і п'ятипровідна схема управління . всі схеми побудовані таким чином , щоб при управлінні стрілкою дотримувалися всі необхідні вимоги безпеки і виключався небезпечний відмову. Сучасна модернізація систем управління та впровадження мікропроцесорних пристроїв дозволяють більш об'єктивно оцінювати роботу стрілочного приводу і переведення стрілки . Для освоєння навичок проектування , впровадженнята обслуговування мікропроцесорних систем управління в Інституті залізнодорожнього транспорту Ризького технічного університету створені кілька макетів , що дозволяють управляти і контролювати підлогові об'єктисистем залізничної автоматики і телемеханіки за допомогою мікроконтролерів S7- 222 фірми "Siemens" . Одним з об'єктів управління і контролює стрілочний привід СП- 3 з двигуном постійного струму і автоперемикачів ножового типу.
Макет являє собою комплекс таких пристроїв:1 . Стрілочний привід СП- 3 ;2 . Мікроконтролер S7- 222 ;3 . Аналоговий модуль S7- 235 ;4 . Персональний комп'ютер на базі процесора Pentium P - IV 3GHz ;5 . Плати інтерфейсного модуля ;6 . Пристрої , що дозволяють імітувати механічне навантаження настрілочний привід. Мікроконтролер має вісім дискретних входів і шість дискретних виходів. Потужність кожного виходу при напрузі живлення 24 В становить2 А. На входи мікроконтролера (рис.3.2 ) подаються керуючі та контрольні сигнали ( команда на переклад стрілки , інформація про становище контактів автоперемикача , сигнал зайнятості стрілочної секції і сигнал замкнуто стістрілки в маршруті ) . З виходів мікроконтролерів знімаються керуючі сигнали , які через плату інтерфейсного модуля подають харчування на електродвигун. Крім того , з виходів мікроконтролера знімаються контрольні сигнали про положення стрілки і сигнал тривоги. Аналоговий модуль має чотири аналогових входи і один аналоговий вихід. Один з аналогових входів використовується для контролю напруги надвигуні електроприводу. Другий аналоговий вхід задіяний для контролю струму двигуна в момент переведення стрілки. Таким чином , контроль таких важливих параметрів , як напруга і струм електродвигуна , а також час переведення стрілки , дає об'єктивну оцінку про знос або несправності стрілочного приводу. Максимальна напруга на аналоговому вході неповинно перевищувати 100 мВ , тому на платі інтерфейсного модуля розташовується шунтового і додаткові опори , з яких і знімаються сигнали, пропорційні напрузі і струму електродвигуна .Схема управління , записана в пам'ять контролера , повинна забезпечувати наступні режими роботи , що задовольняють вимогам безпеки :1 . не допускати переведення стрілки при зайнятою стрілочної секції ;2 . не допускати переведення стрілки , якщо стрілка вже замкнута в маршруті ;3 . забезпечувати закінчення переведення стрілки , якщо під час перекладу стрілкова секція займається ;4 . забезпечувати контроль крайнього положення стрілки ;5 . включення кінцевого реле , що подає напругу на електродвигун , має відбуватися тільки в тому випадку , якщо стрілка вже не на -ходиться в даному положенні ;6 . у разі неотримання контролю протягом 2 секунд при переводі стрілки , автоматично повертати стрілку у вихідне положення - автовозврата ;7 . у разі автовозврата ( 6 пункт) схема управління повинна повторитиспробу переведення стрілки , але не більше 2 разів.
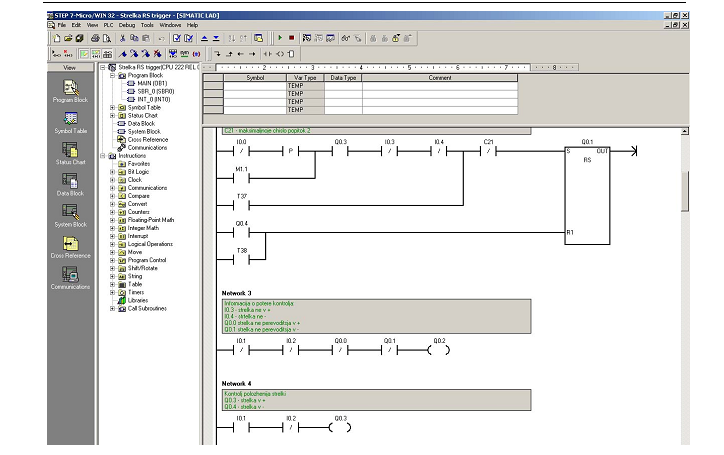
Рис.3.2 Контролер S7-222 з модулем S7-235
Програмування контролера здійснюється в середовищі STEP 7-MicroWINна одному з трьох мов (STL, Ladder, FBD).
Міністерство овіти і науки України
Державний економіко-технологічий університет транспорту Кафедра «АКІТТ» Реферат
На тему «Застосування контролера S7-200 для управління стрілочним електроприводом»
Виконала Студентка групи 4-КІКС Гузієно О.О. Перевірив Габчак М.К.
Київ 2013
Зміст:
1. Історія