

М инистерство
образования и науки Российской Федерации
инистерство
образования и науки Российской Федерации
Федеральное государственное бюджетное образовательное учреждение высшего профессионального образования
«Южно-Уральский государственный университет»
(национальный исследовательский университет)
Факультет «Энергетический»
Кафедра «Электропривод и автоматизация промышленных установок»
Электропривод цепного транспортера
Курсовой проект
по дисциплине «Электрический привод» Вариант 184
Руководитель Сычев Д.А. ______________2013 г. Автор работы студент группы Э-322 Мороз А.С. ________________2013 г. Работа защищена с оценкой ____________________ _______________2013 г.
 Аннотация
Аннотация
Мороз А.С. Электропривод цепного транспортера. – Челябинск: ЮУрГУ, Э-322, 25с., 6 ил., 5 табл., библиогр. список - 3наим.,
Задачей данного курсового проекта является проектирование электропривода цепного транспортера. Проект включает в себя выбор двигателя и редуктора, оценку статических, динамических и энергетических показателей выбранного электропривода. Кроме того, построены нагрузочные диаграммы и механические характеристики выбранного двигателя.
В ходе выполнения курсового проекта, производятся проверки полученных результатов, которые позволяют считать выбранный двигатель пригодным для данного механизма.
Оглавление
Введение 4
1 ИСХОДНЫЕ ДАННЫЕ 5
2 РАСЧЕТ МОЩНОСТИ ДВИГАТЕЛЯ 6
2.1 Нагрузочные диаграммы скорости РО 6
2.2 Нагрузочные диаграммы моментов РО 7
4 ОПРЕДЕЛЕНИЕ ПЕРЕДАТОЧНОГО ЧИСЛА И ВЫБОР РЕДУКТОРА 13
5 РАСЧЕТ ПРИВЕДЕННЫХ СТАТИЧЕСКИХ МОМЕНТОВ СИСТЕМЫ ЭЛЕКТРОПРИВОД – РАБОЧАЯ МАШИНА 14
7 РАСЧЕТ СТАТИЧЕСКИХ ХАРАКТЕРИСТИК ЭЛЕКТРОПРИВОДА 16
8 СХЕМА ПОДКЛЮЧЕНИЯ ПРЕОБРАЗОВАТЕЛЯ 25
Заключение 27
Библиографический список 28
ВВЕДЕНИЕ 4
1.Исходные данные 5
2. РАСЧЕТ МОЩНОСТИ ДВИГАТЕЛЯ……………………………………..6
2.1 НАГРУЗОЧНЫЕ ДИАГРАММЫ СКОРОСТИ РО 6
2.2 НАГРУЗОЧНЫЕ ДИАГРАММЫ МОМЕНТОВ РО 7
3.ПРЕДВАРИТЕЛЬНЫЙ РАСЧЕТ МОЩНОСТИ И ВЫБОР ЭЛЕКТРОДВИГАТЕЛЯ 10
4.ОПРЕДЕЛЕНИЕ ПЕРЕДАТОЧНОГО ЧИСЛА И ВЫБОР РЕДУКТОРА ………………………………………………………….…….12
5.РАСЧЕТ ПРИВЕДЕННЫХ СТАТИЧЕСКИХ МОМЕНТОВ СИСТЕМЫ ЭЛЕКТРОПРИВОД – РАБОЧАЯ МАШИНА. 13
6.ВЫБОР ПРЕОБРАЗОВАТЕЛЯ ЧАСТОТЫ ………. 14
7.РАСЧЕТ СТАТИЧЕСКИХ ХАРАКТЕРИСТИК ЭЛЕКТРОПРИВОДА……….. 15
8.СХЕМА ПОДКЛЮЧЕНИЯ ПРЕОБРАЗОВАТЕЛЯ. 23
ЗАКЛЮЧЕНИЕ 25
БИБЛИОГРАФИЧЕСКИЙ СПИСОК 26
Введение
 В
современной промышленности для повышения
производительности труда повсеместно
используютсяэлектроприводы различных
механизмов.
В
современной промышленности для повышения
производительности труда повсеместно
используютсяэлектроприводы различных
механизмов.
Именно он является основным потребителем электрической энергии и главным источником механической энергии в промышленности.
Отличительной чертой электропривода является возможность изготовления приводов под самые различные требования промышленности, под различную требуемую мощность и скорость, возможность реализовать разнообразные виды движения исполнительных органов с относительно малыми потерями и относительно большой надежностью.
Исходные данные
Цепной транспортер служит для передачи заготовки по направляющим с рольганга 2 на рольганг 6. Движение заготовки обеспечивается с помощью упоров, закрепленных на цепях, натянутых между звездочками ведущего и ведомого валов.
В исходном положении транспортера упоры располагаются за рольгангом 2. После подачи заготовки и остановки рольганга транспортер разгоняется, через 0,2 м зацепляет заготовку и перемещает её на рабочей скорости Vp к рольгангу 6. После достижения заготовкой требуемого положения транспортер реверсируется и на скорости Vв>Vp возвращается в исходное положение.
Следующий цикл начинается с момента подачи на рольганг 2 новой заготовки и ее полной остановки на рольганге.
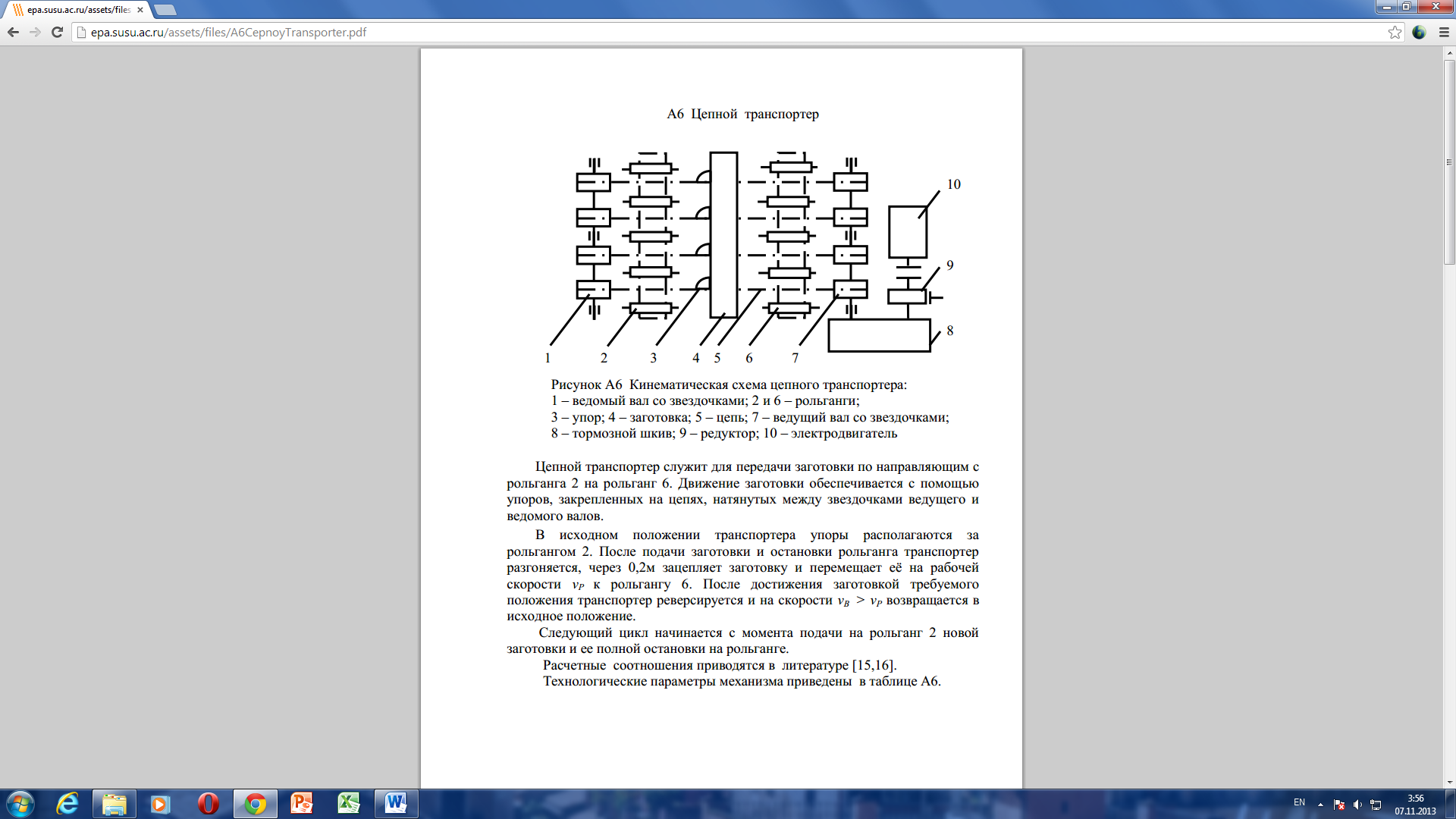
Рис 1. Кинематическая схема цепного транспортера:
1 – ведомый вал со звездочками; 2 и 6 – рольганги; 3 – упор; 4 – заготовка; 5 – цепь; 7 – ведущий вал со звездочками; 8 – тормозной шкив; 9 – редуктор; 10 – электродвигатель
Таблица 1. Исходные данные
Масса вала со звездочками |
Диаметр звездочки |
Момент инерции вала со звездочками |
Масса заготовки |
Длина перемещения заготовки |
Скорость рабочего хода |
Время работы |
Число циклов |
т |
м |
кг*м2 |
т |
м |
м/с |
с |
1/ч |
mВ |
D |
Jр |
mЗ |
L |
Vp |
tp |
z |
2,4 |
0,3 |
60 |
7 |
5 |
0,4 |
25 |
70 |
Принять:
aДОП = 1 м/с2 – допустимое ускорение;
dCT = 0,25∙D–диаметр шейки ролика;
JШ =0,4 кг∙м2 –
момент инерции тормозного шкива;
–
момент инерции тормозного шкива;
Vв =1,5∙Vp – скорость возвратного движения, м/с;