

Содержание
Введение
Параметры двигателя………………………………………………………… 5
Сопротивления резисторов в обмотке ротора, обеспечивающих номинальные токи в обмотках при неподвижном роторе………………. 6
Сопротивления добавочных резисторов RD в обмотке ротора, обеспечивающих различные режимы……………………………………… 7
Определение токов статора в различных режимах………………………. 8
Коэффициент полезного действия при регулировании частоты
вращения……………………………………………………………………… 10
Расчет и построение механических характеристик при различных напряжениях………………………………………………………………….. 10
Расчет и построение механических характеристик при различных частотах питающего напряжения………………………………………….. 14
Расчет и построение механических характеристик при нарушении симметрии питающего напряжения………………………………………..19
Список литературы…………………………………………………………....22
1. Параметры двигателя
1.1. Номинальный ток двигателя
 А.
А.
где Р2Н – номинальная мощность на валу двигателя (указывается в справочниках);
U1Л – номинальное напряжение обмотки статора;
η – коэффициент полезного действия
cosφ – коэффициент мощности в номинальном режиме.
1.2. Параметры т - образной схемы замещения
Параметры Т-образной схемы замещения в именованных единицах определим в следующем порядке:
 Ом.
Ом.
 Ом,
Ом,
 Ом,
Ом,
Номинальное скольжение
где Sном – задано в исходных данных.
Активное сопротивление ротора в именованных единицах
 Ом.
Ом.
Все величины в правой части этой формулы заданы в исходных данных.
Приведенное активное сопротивление ротора в именованных единицах
 Ом.
Ом.
Приведенное индуктивное сопротивление ротора в именованных единицах
 Ом.
Ом.
1.3. Определение электромеханических величин номинальном режиме
Электромагнитная мощность, передаваемая от статора в ротор в номинальном режиме
 Вт,
Вт,
где Р2Н – номинальная мощность на валу. Знак приближенного равенства указывает на то, что преобразованная механическая мощность больше полезной мощности на величину механических потерь.
Электромагнитный вращающий момент асинхронной машины определим в следующем порядке.
Скорость вращения магнитного поля в зависимости от исходных данных определим по формуле
 рад/с,
рад/с,
где nC – частота вращения магнитного поля (синхронная скорость), имеющая размерность [об/мин] (задано в исходных данных);
Тогда электромагнитный вращающий момент будет равен


Электрические потери в двигателе состоят из потерь в обмотке статора ПЭ1Н и в обмотке ротора ПЭ2Н.
Электрические потери в статоре в номинальном режиме


Электрические потери в роторе номинальном режиме

Суммарные потери в двигателе номинальном режиме

Потери в стали магнитной системы при номинальном режиме взять приблизительно

Механические потери в двигателе номинальном режиме

2. Сопротивления резисторов в обмотке ротора, обеспечивающих номинальные токи в обмотках при неподвижном роторе
Резисторы, которые необходимо ввести в цепь обмотки ротора для имитации номинального режима при неподвижном роторе определим из Т – образной схемы замещения (предполагается, что обмотка статора соединена в звезду).
В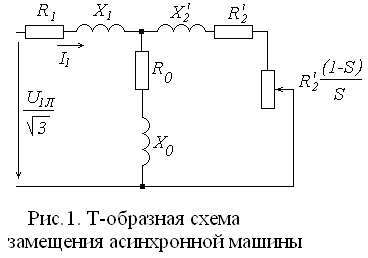 Т-образной схеме замещения (рис. 1.)
сопротивление R'2(1-SН)/SН
обеспечивает номинальные токи в обмотках
статора и ротора. Указанное сопротивление
приведено к параметрам обмотки статора.
Реальное сопротивление, какое нужно
включить к выводам фазной обмотки
ротора, определяется из такого же
соотношения. Значение R2
нужно взять из пункта 1.2.
Т-образной схеме замещения (рис. 1.)
сопротивление R'2(1-SН)/SН
обеспечивает номинальные токи в обмотках
статора и ротора. Указанное сопротивление
приведено к параметрам обмотки статора.
Реальное сопротивление, какое нужно
включить к выводам фазной обмотки
ротора, определяется из такого же
соотношения. Значение R2
нужно взять из пункта 1.2.