

Контрольные вопросы и задания к разделу 1.
Что такое сигнатура класса и сигнатура точки (пикселя)? В каком случае понятие сигнатуры совпадает с понятием образа в данной постановке задачи распознавания?
Какие спектральные диапазоны LANDSAT-7 позволяют получить в результате RGB-синтеза в ERDAS Imagine цвета, близкие к естественным? Какая последовательность установки каналов из основного набора (2,3,4) также дает близкие к естественным цвета? Попробуйте объяснить этот эффект, исходя из соотношений по каналам спектральной отражательной способности основных типов природных объектов (вода-почва-растительность).
Что такое признаковое пространство? Что характеризует цвет на изображении проективной плоскости признакового пространства?
О чем свидетельствует вытянутость диаграммы рассеяния точек в признаковом пространстве вдоль некоторого направления?
Выберите комбинации каналов LANDSAT-7, наиболее информативных для разделения: 1) водных объектов; 2) лесной растительности; 3) различных типов застройки; 4) почв.
Чем отличается сигнатура класса, полученная по исходному изображению, от сигнатуры класса, полученной из пространства признаков?
Чем отличается функция Feature > Masking от функции View > Image Alarm?
2. Неконтролируемая классификация.
Если Вы не имеете большого опыта тематической обработки многозональных изображений, но Вам нужно сделать быструю оценку, сколько классов разделяется по спектральным характеристикам наиболее надежно и где они сосредоточены на изображении, в качестве предварительной «прикидки» можно выполнить неконтролируемую классификацию. Иногда, особенно для необследованных территорий, этот метод может оказаться более подходящим, чем классификация с обучением. Многие специалисты пользуются так называемой двухэтапной схемой тематической обработки. На первом этапе выполняется неконтролируемая классификация на большое количество классов и проводится анализ полученного результата. Те классы, которые соответствуют реальным тематическим объектам, оставляются, остальные, распределившиеся по изображению случайным образом, либо объединяются с уже отобранными классами по близости их спектральных характеристик и относительному расположению на изображении, либо группируются так, чтобы получить еще какие-то интерпретируемые объекты.
Метод неконтролируемой классификации, предлагаемый в пакете ERDAS Imagine, как и в других пакетах тематической обработки аэрокосмической информации, относится к алгоритмам кластерного анализа класса ISODATA. В основе всех алгоритмов этого класса лежит метод кластеризации при заданном количестве групп (алгоритм K средних) [1]. Входными данными здесь являются K центров кластеров, которые в плотных компактных кластерах должны совпадать с выборочными средними по группе.
Шаг итерации базового алгоритма К средних включает: 1) группировку всех точек в кластеры по минимуму расстояния до текущих центров; 2) расчет новых центров как выборочных средних по каждому кластеру. Процедура выполняется до тех пор, пока кластеры и их центры не «стабилизируются». В результате этого процесса минимизируется средний внутригрупповой разброс и максимизируется среднее расстояние между центрами кластеров.
В ERDAS Imagine реализован так называемый алгоритм Форджи, где качество результата оценивается по проценту точек, не перемещающихся из класса в класс в результате очередной итерации (параметр convergence threshold). В полном варианте ISODATA, реализованном в некоторых других пакетах, имеется довольно большое количество параметров настройки, позволяющих автоматически дробить и объединять кластеры. В этих вариантах число кластеров может значительно отличаться от первоначально заданного. В ERDAS Imagine задается только два входных параметра: число кластеров и количество итераций. Более того, Вы можете обрабатывать даже не каждый пиксель, задавая Skip factor по строке и столбцу изображения (X и Y). Это дает еще более грубую прикидку положения кластеров, и вряд ли имеет смысл использовать эти параметры на небольших объемах информации.
Недостатком предлагаемой в ERDAS Imagine реализации является линейная схема задания исходных центров кластеров по статистке изображения (рис.5).
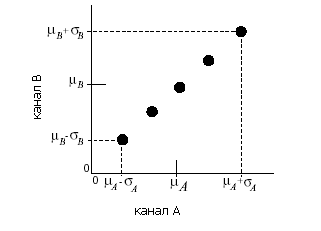
Рис.5.
Обработчику предлагается только два варианта: равномерное расположение исходных центров на диагонали гиперкуба, образуемого осями координат пространства признаков, или же по направлению наибольшего рассеяния точек в признаковом пространстве (так называемой главной компоненте). Однако, как было доказано (Селим и Исмаил,1984), алгоритм K средних обеспечивает сходимость только к локальным максимумам гистограммы изображения. Следовательно, результат будет зависеть от начального положения центров кластеров. Кроме того, максимизация среднего разброса между центрами кластеров приводит к их расположению вдоль главной компоненты, то есть по направлению наибольшего разброса сигнатур пикселей. Поэтому один из предлагаемых способов задания центров (по главной компоненте) фактически сводит к минимуму сам итерационный процесс: кластеры почти не смещаются.
В этом смысле способ задания центров по диагонали гиперкуба несколько интереснее, но тоже недостаточно эффективен. Наибольший интерес представляет вариант выбора исходных центров самим обработчиком. В ERDAS Imagine для этого надо выбрать в окне функции неконтролируемой классификации режим Signature Means и задать собственный входной файл сигнатур, например, сформированный Вами в п.1.2. Однако и в этом случае количество классов не регулируется в процессе кластеризации и всегда соответствует исходному количеству. Поэтому весь эффект кластеризации сводится к поиску ближайших к Вашим сигнатурам областей сгущения точек в признаковом пространстве (локальных пиков многомерной гистограммы). Это обеспечивает несколько лучший результат, чем при обычной классификации по минимуму расстояния, но только в том случае, если классы действительно однородны по яркости.
Количество разделяющихся интерпретируемых классов можно увеличить, задавая большее количество исходных центров, но некоторые классы, даже относительно однородные, разделить неконтролируемой процедурой не всегда удается. Пример такого класса как раз и показан выше на рис.4.
Нужно отметить, что чем больше размерность признакового пространства, тем больше классов нужно задавать для получения приемлемого по качеству результата. Поэтому наилучший результат неконтролируемая классификация дает на 2-4 наиболее информативных слоях.