

9, 14 (28) Забойный скребковый конвейер как мехатронный объект, структурная схема конвейера и су, обоснование запуска на 1 и 2 скорость
Рост произв. => 2 ЄД => алгоритм пуска (сниж динамику при пуске; увелич ресурс) =>пуск определяет ресурс=>критерии перехода с 1 на 2: время, ток=>
Построение конвейера как мехатронного модуля состоит в переносе функциональной нагрузки в большей степени на электронную систему управления, выполненную на базе микропроцессорной техники, что позволяет без значительных стоимостных затрат изменять режимы работы машины (путем программирования) с учетом длины конвейера, угла установки, величины грузопотока, количества приводов, с целью уменьшения динамических перегрузок трансмиссии и става конвейера в период разгона, что приведет к увеличению срока службы узлов и механизмов конвейера и уменьшению вероятности возникновения аварийной ситуации.
Для управления и защиты приводов двухскоростных лавных конвейеров созданы станции управления: КСД27.50 и УКВ.650, обеспечивающие рациональный пуск конвейера с целью уменьшения динамических нагрузок в элементах конвейера при его запуске [4, 5].
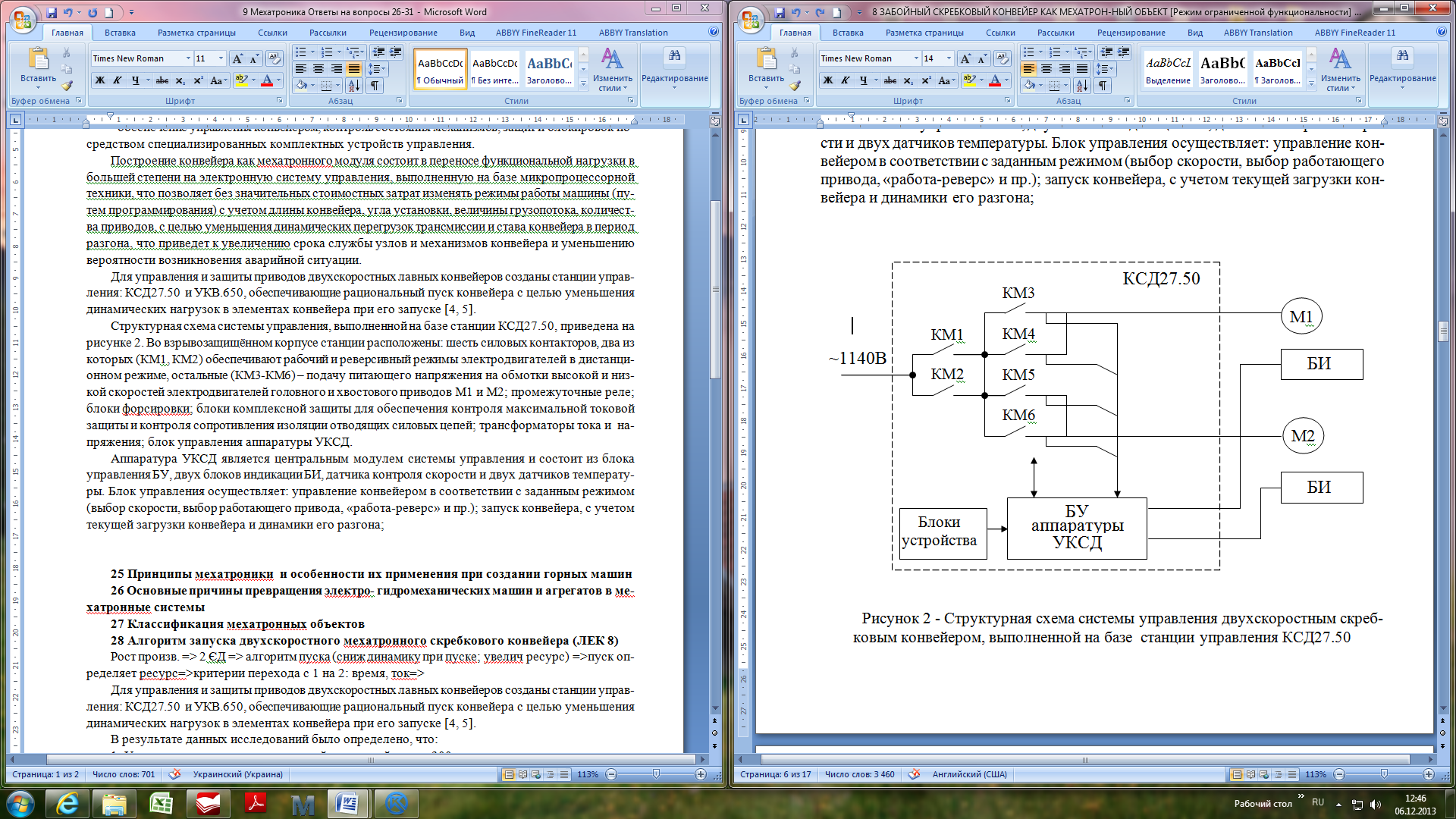
Структурная схема системы управления, выполненной на базе станции КСД27.50, приведена на рисунке 2. Во взрывозащищённом корпусе станции расположены: шесть силовых контакторов, два из которых (КМ1, КМ2) обеспечивают рабочий и реверсивный режимы электродвигателей в дистанционном режиме, остальные (КМ3-КМ6) – подачу питающего напряжения на обмотки высокой и низкой скоростей электродвигателей головного и хвостового приводов М1 и М2; промежуточные реле; блоки форсировки; блоки комплексной защиты для обеспечения контроля максимальной токовой защиты и контроля сопротивления изоляции отводящих силовых цепей; трансформаторы тока и напряжения; блок управления аппаратуры УКСД.
Аппаратура УКСД является центральным модулем системы управления и состоит из блока управления БУ, двух блоков индикации БИ, датчика контроля скорости и двух датчиков температуры. Блок управления осуществляет: управление конвейером в соответствии с заданным режимом (выбор скорости, выбор работающего привода, «работа-реверс» и пр.); запуск конвейера, с учетом текущей загрузки конвейера и динамики его разгона;
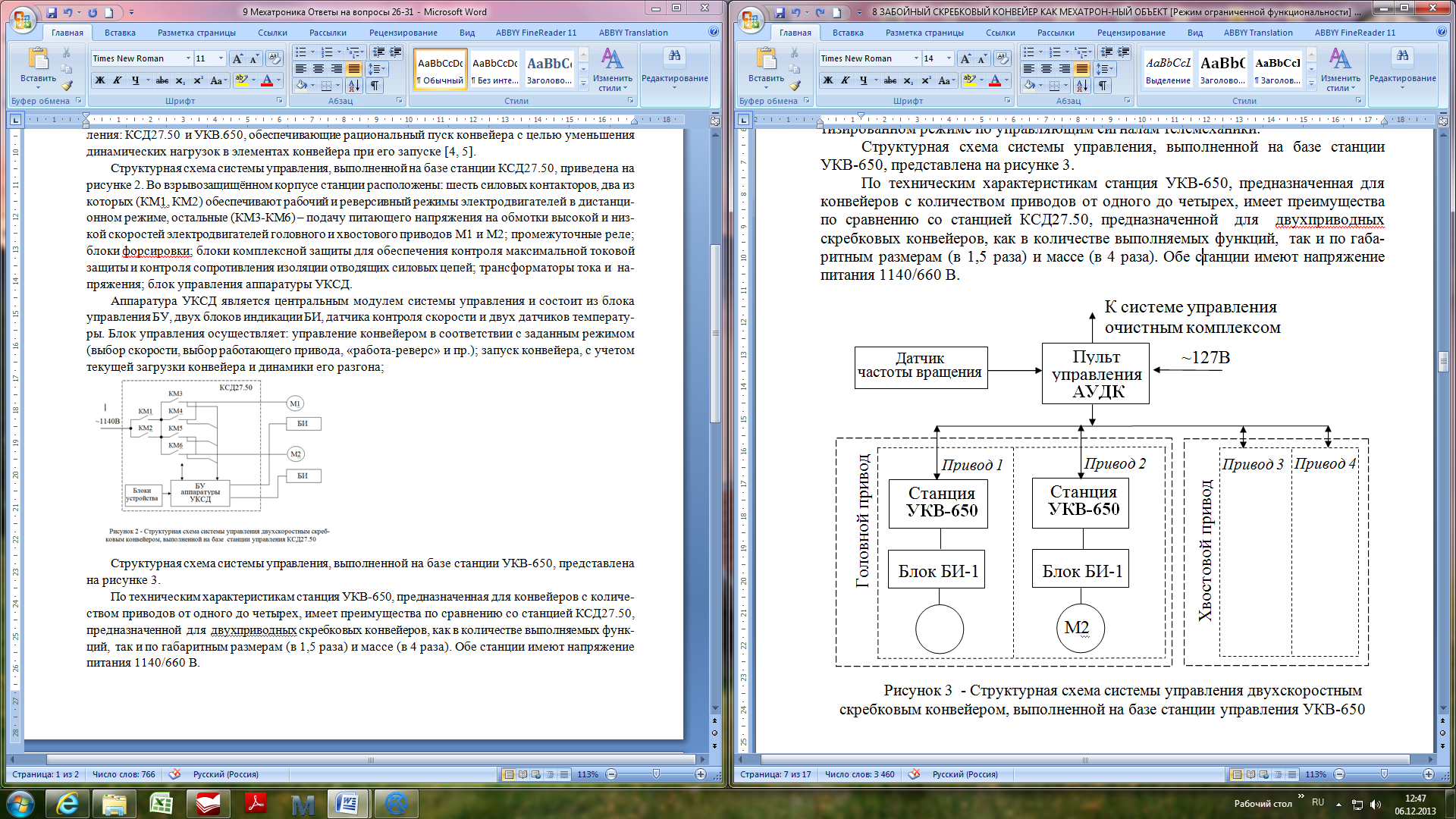
Структурная схема системы управления, выполненной на базе станции УКВ-650, представлена на рисунке 3.
По техническим характеристикам станция УКВ-650, предназначенная для конвейеров с количеством приводов от одного до четырех, имеет преимущества по сравнению со станцией КСД27.50, предназначенной для двухприводных скребковых конвейеров, как в количестве выполняемых функций, так и по габаритным размерам (в 1,5 раза) и массе (в 4 раза). Обе станции имеют напряжение питания 1140/660 В.
В качестве информационных сигналов выступают:
- температурные датчики предельного уровня (t1Г) и хвостового (t1Х) электроприводов;
- температурные датчики предупредительного значения головного (t2Г) и хвостового (t2Х) электроприводов;
- температурные датчики предельного значения приводных редукторов головного (tРГ) и хвостового (tРХ) приводов;
- расход охлаждающей жидкости головного
(РГ)
и хвостового (РХ)
приводов конвейера;
расход охлаждающей жидкости головного
(РГ)
и хвостового (РХ)
приводов конвейера;
- потребляемый ток головного (IГ) и хвостового (IХ) приводов;
- угловая скорость вращения привода (ωr).
Если условно принять, что
V Г Н - включение головного привода на низкую скорость,
V Г В - включение головного привода на высокую скорость,
V Х Н - включение хвостового привода на низкую скорость,
V Х В - включение хвостового привода на высокую скорость,
Алгоритм
– вопрос 8