

39. Синхронный двигатель переменного тока
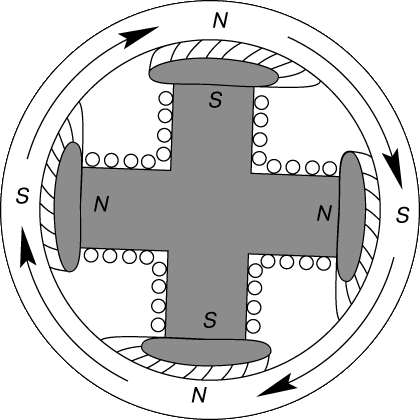
Трехфазный синхронный генератор – обратимая машина, т.е. если обмотку якоря подключить к шинам трехфазного напряжения, а ротор довести до синхронной частоты вращения, то генератор будет работать как двигатель, создавая вращающий момент на валу. Синхронный двигатель почти всегда (исключение – микродвигатели) работает при многофазном питании обмоток статора, создающих вращающееся магнитное поле. Полюса ротора входят в синхронизм с полюсами статора и увлекаются ими (рис. 13). Поэтому при постоянной частоте напряжения питания частота вращения синхронного двигателя постоянна и равна
S = (120f) /P (об/мин).
Важное достоинство синхронного двигателя состоит в том, что он позволяет регулировать коэффициент мощности изменением тока возбуждения. Таким путем можно установить коэффициент мощности, равный 1. В случае недовозбуждения (ток возбуждения меньше номинального) двигатель потребляет ток, отстающий по фазе от напряжения питания, и действует как индуктивная нагрузка; в случае же перевозбуждения он потребляет ток, опережающий по фазе напряжение, и действует как емкостная нагрузка. Благодаря этой особенности синхронный двигатель представляет большую ценность с точки зрения регулирования энергетических систем. За счет реакции якоря ток, отстающий по фазе, усиливает возбуждение, а опережающий – ослабляет его. Как и в случае генератора, обе реакции противодействуют изменению возбуждения и тем самым повышают устойчивость системы.
Пуск.
В отсутствие вращения момент на валу синхронного двигателя равен нулю. Чтобы он заработал, нужно довести его до частоты вращения, близкой к синхронной. Это можно сделать при помощи вспомогательного двигателя. Если синхронный двигатель служит приводным двигателем генератора постоянного тока, то последний можно использовать в качестве двигателя для разгона синхронного двигателя до синхронной частоты. Пуск синхронного двигателя можно также осуществлять при помощи асинхронного двигателя.
В момент пуска ток обмотки якоря может в 3–8 раз превышать нормальное рабочее значение. Чрезмерное понижение напряжения источника питания предотвращают, понижая в этот период подводимое напряжение при помощи последовательно включаемого токоограничивающего реактора.
Асинхронные машины Многофазные асинхронные двигатели.
Принцип действия многофазных асинхронных двигателей состоит в том, что при определенном сдвиге по фазе между многофазными токами в многофазных обмотках они создают вращающееся магнитное поле. Такие многофазные обмотки обычно располагают в пазах на внутренней поверхности статора, набранного из тонких кольцевых пластин, стянутых по оси.
В случае трехфазного переменного тока синхронная частота вращения Nвращающегося поля равна
N = (120f) / P (об/мин),
где f – частота переменного тока, а Р – число полюсов.
Ротор.
Ротор многофазного асинхронного двигателя выполняется в виде шихтованного цилиндрического якоря, набранного из тонких кольцевых пластин с осевыми пазами. Существуют обмотки ротора двух видов: короткозамкнутая (типа «беличьей клетки») и фазная. Короткозамкнутая обмотка выполняется либо из медных стержней, заложенных в пазы и припаянных на концах к массивным торцевым кольцам, замыкающим их накоротко, либо из алюминиевых проводников в пазах и концевых колец, отлитых зацело непосредственно в сердечнике, помещенном в форму. Фазная обмотка состоит из отдельных обмоток для всех фаз, вложенных в пазы ротора, с выводами на токособирательные кольца. Щетки позволяют вводить в цепь ротора сопротивление для увеличения пускового момента, а иногда и для регулировки частоты вращения. Обычно статор – первичный элемент, к которому подводится питание, а ротор – вторичный, в котором наводятся токи.
Вращающееся магнитное поле, создаваемое многофазными токами статора, наводит токи в проводниках ротора. Направление наведенных токов таково, что они, взаимодействуя с индуцирующим их полем, создают вращающий момент, действующий в направлении вращающегося магнитного поля. Таким образом, ротор вращается вслед за полем. Но он не может вращаться с той же частотой, так как тогда наведенные токи были бы равны нулю, а значит, отсутствовал бы вращающий момент. Поэтому неизбежно и необходимо «скольжение» ротора. Скольжение s определяется равенством
s = (N – N2)/N,
где N2 – частота вращения ротора. Например, если синхронная частота вращения N четырехполюсного 60-Гц асинхронного двигателя равна 1800 об/мин, а частота вращения ротора – 1728 об/мин, скольжение равно s = (1800 – 1728)/1800 = 0,04, т.е. 4%. Частота токов ротора равна sf, где f – частота токов в статоре. Например, в упомянутом двигателе частота токов в роторе равна 0,04ґ60 = 2,4 Гц.