

Движение механизма под действием приложенных сил
З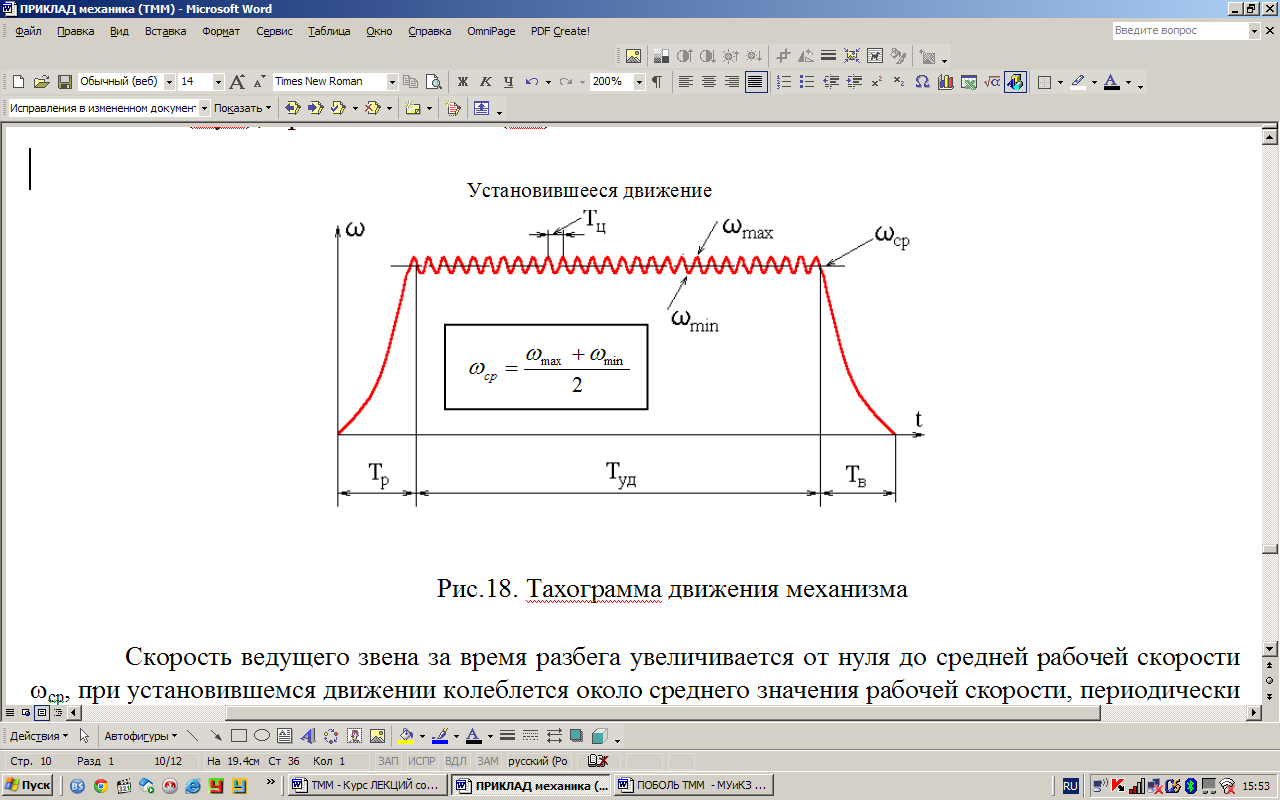 акон
движения всех звеньев определяется
законом движения ведущего звена. На
рис.1.9 показана его тахограмма, т.е.
зависимость угловой скорости ведущего
звена от времени. Из рисунка видно, что
полное время движения механизма состоит
из трех характерных частей, соответствующих
трём фазам движения (разбег -
установившееся движение - выбег):: времени
разбега (Тр); времени
установившегося движения механизма
(Туд); времени выбега (Тв).
акон
движения всех звеньев определяется
законом движения ведущего звена. На
рис.1.9 показана его тахограмма, т.е.
зависимость угловой скорости ведущего
звена от времени. Из рисунка видно, что
полное время движения механизма состоит
из трех характерных частей, соответствующих
трём фазам движения (разбег -
установившееся движение - выбег):: времени
разбега (Тр); времени
установившегося движения механизма
(Туд); времени выбега (Тв).
Рис.1.9. Тахограмма движения механизма
Скорость ведущего звена за время разбега увеличивается от нуля до средней рабочей скорости ср, при установившемся движении колеблется около среднего значения рабочей скорости, периодически при этом повторяясь, а за время выбега уменьшается от средней рабочей скорости до нуля.
Из рисунка видно, что в течение времени установившегося движения скорость ведущего звена изменяется циклически, т.е. периодически повторяется.
Периодом TЦ движения ведущего звена механизма называется промежуток времени, по истечении которого положение, скорость и ускорение ведущего звена принимают первоначальные значения. Обычно цикл соответствует одному обороту.
Следует отметить, что не все механизмы имеют разграниченные части движения; например, в грузоподъемных механизмах, экскаваторах, на некоторых операциях в швейных машинах и др. полное время движения механизма может состоять из времени разбега и выбега, т.е. в этих механизмах отсутствует время установившегося движения.
Периодическое движение механизма, при котором в течение некоторого промежутка времени он обладает постоянным циклом, для технологических машин обычно является основной, когда выполняется технологическая операция.
Качество выполняемой операции определяется безразмерным коэффициентом неравномерности движения δ, который характеризует перепад скоростей установившегося движения по отношению к постоянной средней скорости ωср ведущего вала
![]() (1.12)
(1.12)
Величина коэффициента неравномерности δ в соответствии с этим уравнением не должна превосходить предельно допускаемого значения [δ], установленного для конкретных типов машин по данным их эксплуатации.
Интегральное уравнение движения механизма можно представить в виде уравнения кинетической энергии
WД – WС = E2 – E1, (1.13)
где WД — работа всех движущих сил; WС — работа всех сил сопротивления;
![]() – кинетическая энергия механизма в
начале (i=1) и в конце
(i=2) рассматриваемого
интервала; mi
и JSi
- массы и центральные моменты инерции
подвижных звеньев; vSi
и ωi
– скорости центров масс и угловые
скорости звеньев в начале и в конце
рассматриваемого перемещения.(i
= 1, 2).
– кинетическая энергия механизма в
начале (i=1) и в конце
(i=2) рассматриваемого
интервала; mi
и JSi
- массы и центральные моменты инерции
подвижных звеньев; vSi
и ωi
– скорости центров масс и угловые
скорости звеньев в начале и в конце
рассматриваемого перемещения.(i
= 1, 2).
Правая часть уравнения (13) определяет приращение кинетической энергии от момента времени, соответствующего угловой скорости ведущего звена ω1, до момента, когда она стала равной ω2. Левая часть уравнения представляет собой избыточную работу. За цикл эта избыточная работа равна нулю, но внутри цикла достигает некоторого максимума, который и вызывает колебания мгновенной скорости ведущего звена.
Д ля
обеспечения установившегося движения
в требуемых пределах его неравномерности,
в машине имеется специальное устройство
- маховик.
ля
обеспечения установившегося движения
в требуемых пределах его неравномерности,
в машине имеется специальное устройство
- маховик.
Маховик - это массивный диск с высоким значением момента инерции JМ, который устанавливается на равномерно вращающемся валу (чаще всего главном) и, обладая большим запасов кинетической энергии E = JМω2/2, сглаживает колебания скорости установившегося движения, вызванные изменениями сил сопротивления и движущих сил за цикл. На рис.1.10 показан характерный вид маховика в виде колеса с массивным ободом и тонкими спицами.
Рис.1.10. Маховик технологической машины
При известном перепаде кинетической энергии механизма за цикл ΔЕ момент инерции маховика определяется по формуле
![]() (1.14)
(1.14)
Из уравнения видно, что маховик следует располагать на равномерно вращающемся валу, желательно высокоскоростном.