

Лекция№8
Метод перемещений
В методе сил, изученном в курсе «Строительная механика», за основные неизвестные принимались усилия в лишних связях, для нахождения которых составлялись кинематические уравнения (уравнения неразрывности деформаций), а затем определялись внутренние усилия в сечениях и перемещения в любой точке конструкции, т.е. при расчете статически неопределимых систем методом сил сначала находили силы, а потом перемещения. Можно поступить и наоборот.
Предположим, что требуется рассчитать раму, показанную на рис. 1.1, а.
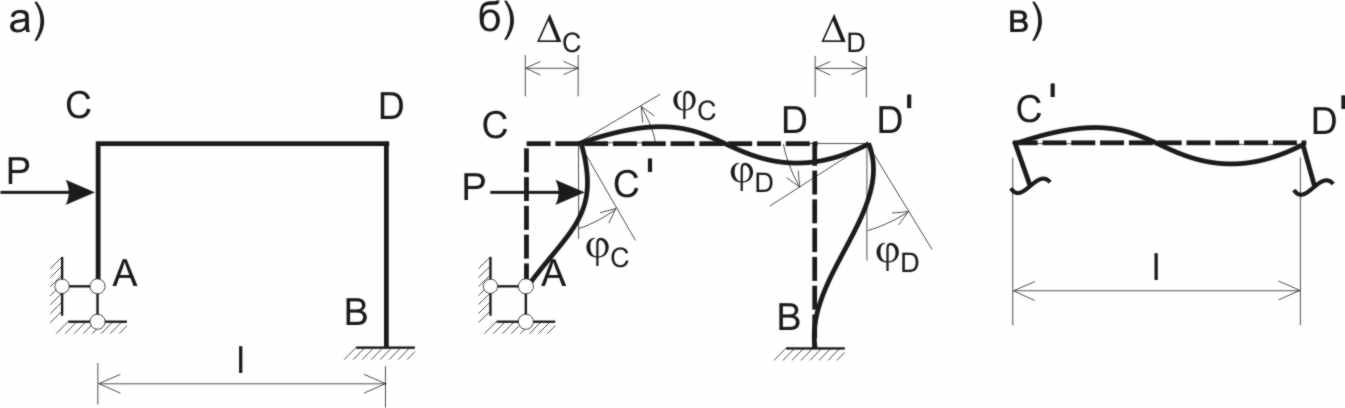
Рис. 1.1
Под
действием нагрузки элементы рамы
искривляются, а ее узлы получают угловые
(![]() )
и линейные (
)
и линейные (![]() )
перемещения (рис. 1.1, б).
Если бы удалось каким-либо образом найти
эти угловые и линейные перемещения, то
по известным формулам сопротивления
материалов можно было легко определить
и внутренние усилия
)
перемещения (рис. 1.1, б).
Если бы удалось каким-либо образом найти
эти угловые и линейные перемещения, то
по известным формулам сопротивления
материалов можно было легко определить
и внутренние усилия
![]() в любом сечении рамы. Вся проблема
состоит в том, как найти эти перемещения.
в любом сечении рамы. Вся проблема
состоит в том, как найти эти перемещения.
Метод, в котором за о с н о в н ы е н е и з в е с т н ы е принимаются угловые и линейные перемещения узлов системы и который позволяет их найти, носит название метода перемещений. Этот метод, как и метод сил, является основным для расчета статически неопределимых стержневых систем.
Основные гипотезы метода перемещений
1. Как и в методе сил, пренебрегаем влиянием продольных и поперечных сил на деформации стержней, т.е. учитываем только деформации изгиба.
2.
Поскольку все перемещения принимаются
малыми, то можно пренебречь сближением
концов стержня при его изгибе, т.е.
предполагается, что первоначальная
длина
![]() прямого стержня
прямого стержня
![]() (см. рис. 1.1, а)
до деформации равна длине
(см. рис. 1.1, а)
до деформации равна длине
![]() хорды
хорды
![]() стягивающей концы стержня после его
деформации (рис. 1.1, в).
стягивающей концы стержня после его
деформации (рис. 1.1, в).
Из
этих гипотез следует, что
![]() а точки
а точки
![]() и
и
![]() будут перемещаться перпендикулярно к
стойкам
будут перемещаться перпендикулярно к
стойкам
![]() и
и
![]() по отрезкам касательных, проведенных
к окружностям радиусов
и
по отрезкам касательных, проведенных
к окружностям радиусов
и
![]() т.е. по горизонтали, и не могут иметь
вертикальных перемещений. Такие же
горизонтальные перемещения (
т.е. по горизонтали, и не могут иметь
вертикальных перемещений. Такие же
горизонтальные перемещения (![]() )
имеют и все остальные точки стержня
)
имеют и все остальные точки стержня
![]()
6.1. Силовое воздействие
Общее
число неизвестных метода перемещений
называют с т е- п е н ь ю к и н е м а т и ч
е с к о й н е о п р е д е л и м о с т и с и
с т е м ы и обозначают буквой
![]() Она определяется как сумма неизвестных
углов поворота
Она определяется как сумма неизвестных
углов поворота
![]() и
неизвестных независимых линейных
перемещений узлов
и
неизвестных независимых линейных
перемещений узлов
![]() :
:
![]() (6.1)
(6.1)
Число неизвестных углов поворота равно числу жестких узлов. Под ж е с т к и м у з л о м будем понимать узел, в котором жестко соединено не менее двух стержней.
Число независимых линейных смещений узлов тоже легко определяется по схеме сооружения, но можно и подсчитать эту величину, рассматривая шарнирную схему сооружения, которая получается из заданной системы путем введения шарниров во все жесткие узлы, включая и опорные. Если в заданной системе имеются статически определимые консоли, то они должны быть предварительно отброшены. Необходимо помнить, что, врезая шарнир в жесткую заделку, получаем шарнирно-неподвижную опору, а, врезая шарнир в скользящую заделку, – шарнирно-подвижную опору. Значение для рам с прямыми стержнями равно степени свободы шарнирной схемы WШ.СХ :
=WШ.СХ = 2УСС0 , (6.2)
где У – число шарнирных узлов рамы, включая опорные; С – число стержней рамы; С0 – число опорных связей.
По шарнирной схеме можно определить не только количество линейных смещений, но и их направления.
Определим число неизвестных метода перемещений для некоторых систем.
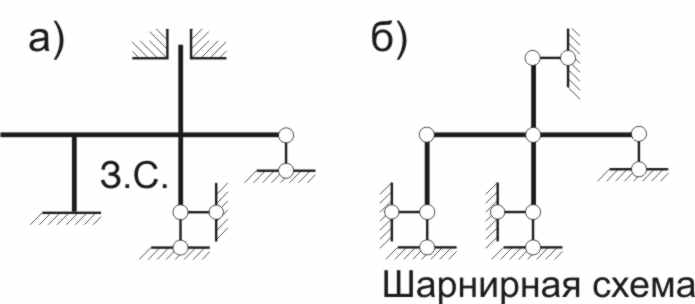 Так
как рама имеет два жестких узла (рис
1.2, а),
Так
как рама имеет два жестких узла (рис
1.2, а),
![]() По
шарнирной схеме (рис. 1, б)
определяем
:
=
2УСС0=
=
По
шарнирной схеме (рис. 1, б)
определяем
:
=
2УСС0=
=![]()
Рис.1.2
Возможно только горизонтальное смещение ригеля.
Степень кинематической неопределимости составляет
![]()
Для
рамы, изображенной на рис. 1.3, а,
имеем
![]() Число
определим по шарнирной схеме (рис. 2,
б):
Число
определим по шарнирной схеме (рис. 2,
б):
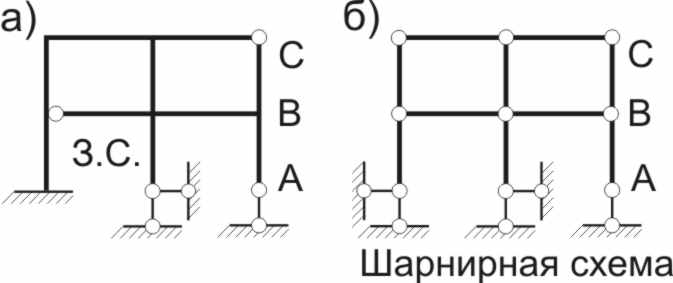 =
2УСС0=
=
2УСС0=![]()
![]()
Возможны
горизонтальные смещения узлов
![]() Общее число неизвестных равно
Общее число неизвестных равно ![]()
Рис.1.3
Порядок расчета сооружения методом перемещений аналогичен порядку расчета стержневых систем методом сил. Подсчитав степень кинематической неопределимости системы, вводят в расчет вместо заданной системы основную, но получают ее здесь не отбрасыванием лишних связей, а наложением дополнительных, устраняющих возможные перемещения узлов. Если во все жесткие узлы системы ввести заделки (защемления), препятствующие поворотам узлов, и закрепить узлы от поступательных смещений установкой дополнительных стержней (опорных стержней), то получим в качестве основной системы совокупность независимых однопролетных статически неопределимых балок двух видов: балка с двумя заделками по концам и балка, у которой на одном конце заделка, а на другом – шарнирно-подвижная опора. Эти балки постоянного сечения заранее рассчитаны на все виды воздействий (см., например, задачи для самостоятельного решения в гл. 5 и ответы к ним), и их решения для наиболее часто встречающихся случаев помещены в табл. 1.1.
С помощью табл. 1.1 в дальнейшем весьма просто строятся единичные и грузовые эпюры моментов путем формального переноса соответствующих эпюр моментов из таблицы на деформированные стержни основной системы от различных воздействий.
Число вводимых связей равно степени кинематической неопределимости системы: число дополнительных заделок совпадает со степенью угловой подвижности (количество жестких узлов ), а число дополнительных опорных стержней – со степенью линейной подвижности узлов ( = WШ.СХ).
Дополнительная заделка эквивалентна одной связи и отличается от обычной опорной жесткой заделки, которая эквивалентна трем связям, тем, что препятствует только угловым перемещениям узлов и не препятствует их поступательным перемещениям. В дополнительной заделке может возникать в качестве реакции только момент. Эта так называемая моментная, или угловая связь. В дополнительном стержне возникает реакция, направленная по оси этого стержня, – это силовая или поступательная связь.
Поскольку узлы заданной системы под внешним воздействием могли иметь угловые и линейные перемещения, а в основной системе они невозможны, чтобы сделать основную систему эквивалентной заданной по перемещениям и усилиям, надо дополнительно к заданному внешнему воздействию приложить во введенные связи действительные угловые и линейные перемещения, которые пока неизвестны.
Этими
перемещениями компенсируется введение
дополнительных закреплений, и как раз
они являются основными неизвестными
метода перемещений, которые обозначаются
буквой
![]() с подстрочным индексом (
с подстрочным индексом (![]() ).
Введением неизвестных перемещений в
дополнительные связи и определяется
окончательная основная система, которую
можно назвать к и н е м а т и ч е с к и о
п р е д е л и м о й. В дальнейшем изложении
она будет изображаться с заданными
нагрузками, дополнительными связями и
неизвестными перемещениями
).
Введением неизвестных перемещений в
дополнительные связи и определяется
окончательная основная система, которую
можно назвать к и н е м а т и ч е с к и о
п р е д е л и м о й. В дальнейшем изложении
она будет изображаться с заданными
нагрузками, дополнительными связями и
неизвестными перемещениями
![]() Отметим, что основная система метода
перемещений – единственная.
Отметим, что основная система метода
перемещений – единственная.
При расчете симметричных систем методом перемещений, так же, как и при расчете методом сил, можно и нужно применять способ группировки неизвестных, который значительно облегчает расчет.
Таблица 1.1
¹ п/п |
Схема балки и воздействия на нее |
Эпюры изгибающих моментов и реакции |
Формулы моментов и реакций |
|||
1 |
|
|
|
|||
2 |
|
|
|
|||
3 |
|
|
при
|
|||
4 |
|
|
|
|||
5 |
|
|
|
|||
¹ п/п |
Схема балки и воздействия на нее |
Эпюры изгибающих моментов и реакции |
Формулы моментов и реакций |
|||
6 |
|
|
|
|||
7 |
|
|
|
|||
8 |
|
|
|
|||
9 |
Неравномерный нагрев
|
|
|
|||
10 |
|
|
|
|||
11 |
|
|
|
|||
















¹ п/п |
Схема балки и воздействия на нее |
Эпюры изгибающих моментов и реакции |
Формулы моментов и реакций |
||||||
12 |
|
|
|
||||||
13 |
|
|
|
||||||
14 |
|
|
при
|
||||||
15 |
|
|
при ;
|
||||||
16 |
|
|
|
||||||
¹ п/п |
Схема балки и воздействия на нее |
Эпюры изгибающих моментов и реакции |
Формулы моментов и реакций |
||||||
17 |
|
|
|
||||||
18 |
Неравномерный нагрев
|
|
коэффициент линейного расширения; высота поперечного сечения |
||||||











Неизвестные перемещения симметрично расположенных узлов группируются в новые парные неизвестные, представляющие собой симметричные и обратносимметричные перемещения. Группировать можно как угловые, так и линейные неизвестные. В расчетной практике чаще встречаются задачи, в которых группируются только угловые неизвестные. Тогда угол поворота одного узла представляем как сумму двух неодинаковых в общем случае углов, а угол поворота симметричного узла – как их разность. За одно из неизвестных принимается теперь поворот уже не одного, а сразу двух симметрично расположенных узлов на одну и ту же величину и в одном направлении. Поворот этих же узлов на одну и ту же величину в противоположных направлениях принимается за второе групповое неизвестное.
Лекция№9
Cвойства для систем с вертикальной осью:
1. Угловое неизвестное, находящееся на оси симметрии, является обратносимметричным.
2. Вертикальное линейное неизвестное, находящееся на оси симметрии, является симметричным.
3. Горизонтальное линейное неизвестное, направленное вдоль ригеля, является обратносимметричным.
Если
заданная система
![]() раз кинематически неопределима, то
после наложения на нее
дополнительных связей, устраняющих
возможные перемещения ее узлов и
приложения к ним неизвестных перемещений
раз кинематически неопределима, то
после наложения на нее
дополнительных связей, устраняющих
возможные перемещения ее узлов и
приложения к ним неизвестных перемещений
![]() ,
система канонических уравнений метода
перемещений для определения этих
неизвестных может быть представлена в
виде
,
система канонических уравнений метода
перемещений для определения этих
неизвестных может быть представлена в
виде
![]() (1.3)
(1.3)
или в матричной форме:
![]() ,
(1.4)
,
(1.4)
где
![]()
вектор неизвестных;
вектор неизвестных;
![]()
вектор свободных (грузовых) членов;
вектор свободных (грузовых) членов;
![]()
матрица внешней жесткости системы,
которая в развернутой форме имеет вид
матрица внешней жесткости системы,
которая в развернутой форме имеет вид
![]() (1.5)
(1.5)
Все
реакции, обозначенные буквой
![]() называются единичными реакциями. Так,
называются единичными реакциями. Так,
![]()
реакция, возникающая в дополнительной
связи
реакция, возникающая в дополнительной
связи
![]() где имеется перемещение
где имеется перемещение
![]() от перемещения связи
от перемещения связи
![]() на единицу (от
на единицу (от
![]() );
);
![]()
реакция, возникающая в дополнительной
связи
реакция, возникающая в дополнительной
связи
![]() от перемещения связи
на величину
от перемещения связи
на величину
![]() ;
;
![]()
реакция, возникающая в дополнительной
связи
где имеется перемещение
от смещения этой же связи на единицу
(
реакция, возникающая в дополнительной
связи
где имеется перемещение
от смещения этой же связи на единицу
(![]() );
);
![]()
реакция в связи
от ее смещения на величину
реакция в связи
от ее смещения на величину
![]() ;
;
![]()
реакция, возникающая в связи
от действия на основную систему нагрузки.
Первый индекс у
и
показывает номер связи, в
которой возникает реакция, а второй
указывает на причину появления
реакции. Реакция, возникающая в связи
(
,
),
считается
положительной, если ее направление
совпадает с направлением неизвестного
перемещения
показанного на основной системе. Еще
раз напомним, что реакции, возникающие
в дополнительных заделках (защемлениях),
называются реактивными моментами, а в
дополнительных опорных стержнях,
просто реакциями, или реактивными
усилиями.
реакция, возникающая в связи
от действия на основную систему нагрузки.
Первый индекс у
и
показывает номер связи, в
которой возникает реакция, а второй
указывает на причину появления
реакции. Реакция, возникающая в связи
(
,
),
считается
положительной, если ее направление
совпадает с направлением неизвестного
перемещения
показанного на основной системе. Еще
раз напомним, что реакции, возникающие
в дополнительных заделках (защемлениях),
называются реактивными моментами, а в
дополнительных опорных стержнях,
просто реакциями, или реактивными
усилиями.
Поскольку уравнения (1.3), (1.4) являются условиями эквивалентности по усилиям заданной и основной систем (условиями равновесия), ф и з и ч е с к и й с м ы с л любого -го уравнения заключается в том, что суммарная реакция в дополнительной связи от действия всех неизвестных и нагрузки на основную систему равна нулю, потому что в заданной системе эта дополнительная связь отсутствует.
Как и в методе сил, коэффициенты с одинаковыми индексами, расположенные на главной диагонали матрицы (6.5), называются г л а в н ы м и коэффициентами, которые всегда п о л о ж и- т е л ь н ы и не равны нулю. Остальные коэффициенты этой матрицы называются п о б о ч н ы м и. Они могут быть положительными, отрицательными и равными нулю. В соответствии с первой теоремой Рэлея о взаимности реакций между побочными коэффициентами выполняется соотношение
![]() ,
,
вследствие
чего матрица внешней жесткости
будет симметричной и, как матрица внешней
податливости
![]() в методе сил, положительно определенной.
в методе сил, положительно определенной.
Для
вычисления коэффициентов при неизвестных
и свободных членов канонических уравнений
метода перемещений надо сначала построить
эпюры изгибающих моментов
![]() в основной системе от единичных
неизвестных перемещений узлов рамы и
в основной системе от единичных
неизвестных перемещений узлов рамы и
![]() от внешней нагрузки. При построении
единичных эпюр моментов
от внешней нагрузки. При построении
единичных эпюр моментов
![]() весьма желательно предварительно
показать пунктирной линией характер
деформирования оси каждого стержня от
единичного угла поворота или линейного
смещения, что позволит установить
положение растянутых волокон и безошибочно
перенести из табл. 6.1 эпюры моментов для
отдельных балок на основную систему и
тем самым правильно изобразить единичную
эпюру моментов в целом.
весьма желательно предварительно
показать пунктирной линией характер
деформирования оси каждого стержня от
единичного угла поворота или линейного
смещения, что позволит установить
положение растянутых волокон и безошибочно
перенести из табл. 6.1 эпюры моментов для
отдельных балок на основную систему и
тем самым правильно изобразить единичную
эпюру моментов в целом.
После
построения единичных эпюр моментов
и грузовой эпюры моментов
переходят к вычислению коэффициентов
и свободных членов
![]() применяя статический
или кинематический
(перемножение эпюр) способы.
применяя статический
или кинематический
(перемножение эпюр) способы.
С
т а т и ч е с к и й с п о с о б из-за своей
простоты и наглядности является основным
способом определения коэффициентов
при неизвестных и свободных членов и
основан на использовании уравнений
равновесия. Особенно просто находятся
реакции, представляющие собой реактивные
моменты во введенных защемлениях, из
условий равновесия вырезанных из
основной системы узлов в виде
![]()
Несколько
сложнее вычисляются реакции, представляющие
собой реактивные усилия во введенных
опорных стержнях. Для их определения
составляются уравнения равновесия
некоторой отсеченной части основной
системы, содержащей эти силовые связи,
в виде
![]()
К и н е м а т и ч е с к и й с п о с о б дает возможность находить реактивные моменты и усилия в дополнительных связях аналогично тому, как это делалось в методе сил, т.е. путем интегрирования (перемножения) соответствующих эпюр по формулам, вытекающим из теоремы о взаимности работ:
![]() (1.6)
(1.6)
где
,
![]() –
единичные эпюры моментов, построенные
в основной системе метода перемещений;
–
единичные эпюры моментов, построенные
в основной системе метода перемещений;
![]() –
эпюра моментов от нагрузки, построенная
в любой статически определимой системе,
полученной из заданной.
–
эпюра моментов от нагрузки, построенная
в любой статически определимой системе,
полученной из заданной.
В практических расчетах при определении единичных реакций и свободных членов или их проверке кинематический способ из-за трудоемкости вычислений и вероятности появления ошибок не при-меняется. Как исключение он может быть использован для вычисления некоторых коэффициентов при расчете рам с наклонными стойками, когда применение статического способа усложняется.
В то же время формулы (1.6) примечательны тем, что при нахождении коэффициентов уравнений (1.3) можно воспользоваться, как и в методе сил, свойством взаимной ортогональности эпюр моментов, из которого следует, что если одна из эпюр моментов симметрична, а другая – обратносимметрична, то соответствующий коэффициент или свободный член являющийся результатом перемножения этих эпюр, априорно равен нулю.
В
симметричных системах разделение
неизвестных перемещений
![]() на две группы (симметричные и
обратносимметричные), как известно,
приводит к разделению общей системы
канонических уравнений (1.3) на две
подсистемы, одна из которых содержит
только симметричные, а другая
только обратносимметричные неизвестные.
В методе перемещений для таких систем
остаются справедливыми и два правила
о действии на симметричное сооружение
симметричной или обратносимметричной
нагрузки.
на две группы (симметричные и
обратносимметричные), как известно,
приводит к разделению общей системы
канонических уравнений (1.3) на две
подсистемы, одна из которых содержит
только симметричные, а другая
только обратносимметричные неизвестные.
В методе перемещений для таких систем
остаются справедливыми и два правила
о действии на симметричное сооружение
симметричной или обратносимметричной
нагрузки.
Подставив
найденные коэффициенты
и свободные члены
в систему (1.3) и решив ее, найдем
действительные значения неизвестных
метода перемещений
![]() После этого окончательную эпюру моментов
строим, как и в методе сил, т.е. как
алгебраическую сумму эпюры от заданной
нагрузки в основной системе
и единичных эпюр
После этого окончательную эпюру моментов
строим, как и в методе сил, т.е. как
алгебраическую сумму эпюры от заданной
нагрузки в основной системе
и единичных эпюр
![]()
![]() умноженных на найденные значения
неизвестных:
умноженных на найденные значения
неизвестных:
![]()
где
![]()
исправленная единичная эпюра моментов.
исправленная единичная эпюра моментов.
Следует
отметить, что как исходные
![]() ,
,![]() ,
так и исправленные эпюры моментов метода
перемещений являются неуравновешенными,
в то время как окончательная эпюра
изгибающих моментов должна быть
обязательно уравновешенной. Поэтому
необходимым и достаточным условием
правильности эпюры
,
так и исправленные эпюры моментов метода
перемещений являются неуравновешенными,
в то время как окончательная эпюра
изгибающих моментов должна быть
обязательно уравновешенной. Поэтому
необходимым и достаточным условием
правильности эпюры
![]() является равенство нулю реакций во всех
введенных связях при правильных единичных
и грузовой эпюрах. Это означает, что все
узлы системы должны быть уравновешены,
и должны отсутствовать реактивные
усилия в дополнительных опорных стержнях.
Обычно второе условие (равенство нулю
реактивных усилий) сразу не проверяется,
а совмещается с проверкой эпюр
является равенство нулю реакций во всех
введенных связях при правильных единичных
и грузовой эпюрах. Это означает, что все
узлы системы должны быть уравновешены,
и должны отсутствовать реактивные
усилия в дополнительных опорных стержнях.
Обычно второе условие (равенство нулю
реактивных усилий) сразу не проверяется,
а совмещается с проверкой эпюр
![]() и
и
![]()
Наряду со статической может быть применена и кинематическая проверка, как это делалось в методе сил. Для этого надо окончательную эпюру моментов умножить на единичные эпюры или на их суммарную, построенные в любой основной системе метода сил, образованной из заданной. При практических расчетах эту проверку, как правило, не выполняют.
После частичной или полной проверки эпюры по обычным правилам строят эпюры поперечных и продольных сил
Окончательной
проверкой правильности всего расчета
является одновременное выполнение всех
трех уравнений статики (![]() )
как для заданной системы в целом, так и
для любых отдельных ее частей.
)
как для заданной системы в целом, так и
для любых отдельных ее частей.
Последовательность расчета статически неопределимых систем методом перемещений остается такой же, как и методом сил.
Лекция№10