1.3. Требования к срв ла
В настоящее время существуют значительное число зарубежных и национальных стандартов, которым должны удовлетворять программное обеспечение СРВ.
Национальные стандарты:
1. ГОСТ Р 51904-2002. Программное обеспечение встроенных систем. Общие требования к разработке и документированию. Данный стандарт распространяется на процессы разработки и документирования программного обеспечения (ПО) встроенных систем реального времени. Стандарт распространяется на все действия, имеющие отношение к разработке программного обеспечения. Настоящий стандарт применяют полностью ко всему поставляемому программному обеспечению, включая среду разработки, если контрактом не предусмотрено использование специальных стандартов для определенных заказчиком типов ПО. Стандарт неприменим для аппаратных элементов программно-аппаратного обеспечения.
2. Межгосударственный Авиационный Комитет. Авиационный Регистр. Квалификационные требования. Часть 178А. Требования к программному обеспечению бортовой аппаратуры и систем при сертификации авиационной техники. Данный документ предназначен для описания технических приемов и методов, которые могут быть использованы для упорядоченной разработки и сопровождения ПО, являющегося частью бортовой цифровой аппаратуры и систем. Данный стандарт разрабатывался на основе отечественного опыта в данной области и документов по сертификации программного обеспечения DO-178 и DO-178A американского комитета RTCA Он предназначен для применения Разработчиками образцов авиационной техники (AT), в состав которых входят цифровые системы и аппаратура, а также Разработчиками и Изготовителями цифровой аппаратуры и систем.
Зарубежные стандарты:
1.Стандарт DO-178. Software Consideration in Airborne Systems and Equipment Certification. Данный стандарт разработан американским комитетом RTCA (Radio Technical Commission for Aeronautics, http://www.rtca.org). Первая версия стандарта была принята в 1982 году, вторая (DO-178A) – в 1985. В настоящее время используется версия DO-178B, утвержденная в 1992 году.
2. POSIX. Portable Operating System Interface for UINX. Определяет переносимый интерфейс ОС на уровне исходных текстов (http://www.pasc.org).
1.4. Передача данных
СРВ взаимодействует с внешней средой по различным цифровым и аналоговым интерфейсам. Устройства связи обеспечивают информационное взаимодействие СРВ с внешней средой. Различают два вида передачи цифровой информации: синхронная и асинхронная передача данных.
При синхронной передачи данных тактовая частота передачи данных передается отдельной линией.
При асинхронной передачи данных тактовые частоты приемника и передатчика не синхронизированы между собой, но они должны быть настроены на одинаковую частоту приема передачи данных.
Отдельно можно выделить передачу данных с использованием самосинхронизирующихся кодов.
1.4.1. Синхронная передача данных
Временная диаграмма сигналов при синхронной передаче данных приведена на рис1.4.1.
|
Рисунок 1.4.1. Временная диаграмма сигналов при синхронной передаче данных |
Кадровый синхроимпульс FRM используется для инициализации передачи кадра данных. Биты данных идут последовательно друг за другом. Наличие нового сигнала FRM будет означать прием или передачу нового кадра данных. Биты данных следуют под передний фронт тактовой частоты CLK.
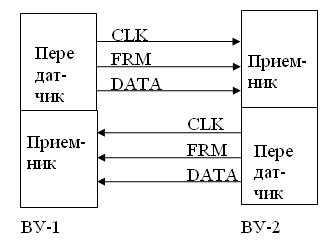
На рисунке 1.4.2 показана схема передачи данных последовательным синхронным кодом между двумя внешними устройствами. Каждое из внешних устройств для приема и передачи данные использует три линии: CLK, FRM, DATA. Т.е. для передачи данных в обе стороны между ВУ-1 и ВУ-2 необходимо шесть линий.
|
Рисунок 1.4.2. Схема передачи данных последовательным синхронным кодом между двумя внешними устройствами |