

7.4 Переходные процессы при линейном изменении управляющего воздействия
При пуске электропривода включением его в сеть на полное напряжение переходные процессы протекают при скачке напряжения, или как говорят, при ω0=const. Применение реостатных методов ограничения бросков тока и момента не может обеспечить переходные процессы с максимальным быстродействием. Переходные процессы, близкие к оптимальным, можно получить путем плавного изменения управляющего воздействия. Они протекают в этом случае при ω0=f(t). При этом ограничивается темп нарастания управляющего воздействия путем ограничения ускорения ε0.
Уравнение линейной механической характеристики двигателя с отрицательной жесткостью может быть записано:
 (7.17)
(7.17)
где Mкз – момент короткого замыкания двигателя,
β=с2/Rя – жесткость механической характеристики.
Подставив (7.17) в основное уравнение движения привода после простых преобразований будем иметь:
 =
= (7.18)
(7.18)
Коэффициент при производной угловой скорости представляет собой известную электромеханическую постоянную времени Тм. Правая часть уравнения представляет собою скорость wс, соответствующую моменту сопротивления Мс, однако, в рассматриваемом случае w0, а значит и wс не постоянные величины, а известные функции времени w0(t) и wc(t). Таким образом, уравнение (7.18) имеет вид:
 .
. (7.19)
(7.19)
Определим решение этого дифференциального уравнения w(t) при линейном изменении wс во времени. Для получения зависимости момента двигателя М(t) нужно в уравнение движения подставить производную функции w(t):
 .
(7.20)
.
(7.20)
Для начала исследования принимаем общее уравнение закона изменения задающего воздействия wс(t) = а + kt. (7.21)
Тогда уравнение (7.19) с учетом (7.21) примет вид:
 (7.22)
(7.22)
Решение
(7.22) определим в виде суммы свободной
wсв
и принужденной wпр
составляющих
w
= wсв
+ wпр
=A· .
.
времени. Подставив wпр и dωпр/dt=k в (7.22) получим kTм+ B + kt = a + kt, или B = a – kTм .
Определим
A
с учетом
начальных условий из полученного решения
уравнения (7.22) w
=A· при t
= 0 w
= wнач:
при t
= 0 w
= wнач:
wнач = А + а - kTм, или А = wнач - а + kTм.
Таким образом, решение уравнения (7.22) будет иметь вид:
 (7.23)
(7.23)
Определим
решение уравнения (7.20) с учетом полученного
выражения (7.23), определив производную
скорости:
 .
.
 .
(7.24)
.
(7.24)
Рассмотрим переходные процессы в различных режимах работы электропривода.
Пуск привода вхолостую (Мс=0).
Так как пуск осуществляется при Мс = 0, в соответствии с механической характеристикой привода wс(t) будет совпадать с w0(t)=ε0·t,
где ε0 - ускорение, характеризующее темп изменения w0.
Поскольку переходный процесс состоит из двух этапов, его необходимо рассчитать отдельно для каждого участка: при 0 < t < t1, wс(t) = e0· t и при t > t1, когда wс(t) =w0 = сonst.
I этап (0 < t < t1).
Приняв, что при t = 0 wнач = 0 и подставив в (7.23) а = 0 и k = e0, получим
 (7.25)
(7.25)
Из
уравнения (7.24) при Мс=0 и
wнач =
0 найдем закон изменения момента:
 (7.26)
(7.26)
Тогда
ускорение привода будет
 ,
(7.27)
,
(7.27)
и скорость, изменяясь асимптотически, приближается к линейной зависимости.
При t > 3Тм , считая изменение ускорения завершимся, т.е. dω/dt ≈ε0, скорость изменяется в том же темпе, что и задающее воздействие, вызвавшее переходный процесс. Уравнение (7.25) при t > 3Тм можно записать в виде:
w = e0(t - Тм) = wс(t) - e0Тм . (7.28)
Поэтому кривая переходного процесса w(t) сдвинута вправо относительно кривой wс(t) на величину Тм, и в каждый момент времени при t > 3Тм разница между wс и w составляет e0Тм.
Механические характеристики при пуске и графики, описываемые уравнениями (7.25 – 7.28), представлены на рис.7.7.
Момент в соответствии с (7.26) возрастает по экспоненциальному закону и при t > 3Тм достигает максимальной величины Mmax=ε0J. Это значение позволяет оценить допустимую величину ускорения. Действительно, если считать, что в переходном процессе Мmax = Мдоп, то εдоп= Мдоп/J.
По
допустимым значениям ускорения и момента
можно найти минимальное время на 1 этапе
пуска привода:
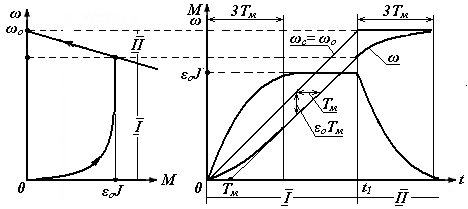
Рис.7.7 Механические характеристики и переходные процессы
при пуске ДПТ НВ вхолостую с ω0(t)=ε0t
II этап (t > t1).
На II этапе режим определяется естественной механической характеристикой при постоянном задающем воздействии и wс =w0. Переходный процесс в этом случае ничем не отличается от рассмотренных ранее переходных процессов в разделе 7.2. При отсчете времени от t1 скорость w и момент М будут изменяться в соответствии с уравнением (7.4), где начальными значениями будут ωнач=ω(t1) и Mнач=ε0J, конечными – ω0 и 0.
Графики переходных процессов w(t) и M(t) на II этапе показаны на рис.7.7, там же приведена динамическая механическая характеристика для случая пуска вхолостую.
2. Реверс при Mc=0.
При реверсе двигателя скорость w0 меняет направление, причем изменение w0 осуществляется по линейному закону при 0< t < t1, затем при t > t1 w0 =const.
Переходный процесс в этом случае состоит из двух участков, которые рассматриваются отдельно. Так как переходный процесс осуществляется вхолостую (Мс = 0), то wс(t) = w0(t).
I этап (0 < t < t1).
На I этапе wс(t) описывается уравнением (7.21), и подставив его в уравнение (7.23) а = w0, k = -e0 и wнач = w0, получим:
 (7.29)
(7.29)
Изменения момента М описываются уравнением:
 (7.30)
(7.30)
Ускорение
привода из (7.30) описывается
 ),
начальное значение которого равно нулю.
При t > 3Тм ускорение
принимает установившееся значение ε≈ε0
и скорость двигателя уменьшается
по линейной зависимости w
= w01 -
e(t - Тм)
= wс(t)
+ eТм .
Как и при пуске, кривая w(t)
располагается правее кривой wс(t)
, причем сдвиг по оси t составляет
величину Тм, а в каждый
момент времени при t > 3Тм
разница между wс
и w
составляет ε0Tм.
Момент отрицателен и изменяется по
экспоненциальному закону до величины
Mмакс = - ε0J
.
),
начальное значение которого равно нулю.
При t > 3Тм ускорение
принимает установившееся значение ε≈ε0
и скорость двигателя уменьшается
по линейной зависимости w
= w01 -
e(t - Тм)
= wс(t)
+ eТм .
Как и при пуске, кривая w(t)
располагается правее кривой wс(t)
, причем сдвиг по оси t составляет
величину Тм, а в каждый
момент времени при t > 3Тм
разница между wс
и w
составляет ε0Tм.
Момент отрицателен и изменяется по
экспоненциальному закону до величины
Mмакс = - ε0J
.
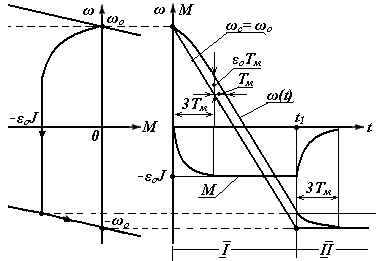
Рис.7.8 Механические характеристики и переходные процессы
при реверсе ДПТ НВ вхолостую с ω0(t)=ε0t
II этап (t > t1).
Переходные процессы на II этапе описываются уравнениями экспонент, т.к. ω0=const, причем скорость принимает установившееся значение, равное синхронной скорости, а момент – нулевое значение. Механические характеристики и кривые переходных процессов wс(t), w(t) и М(t) показаны на рис.7.8.
При торможении вхолостую заданное значение скорости также изменяется по линейному закону от значения w0 до нуля. Как и при реверсе, процесс состоит из двух этапов, причем на I этапе (0 < t < t1 ) кривые w(t) и М(t) не отличаются от аналогичных кривых при реверсе, а на II этапе - описываются уравнениями (7.4-7.5) с начальными значениями ωнач=ω(t1), Mнач=-ε0J, нулевыми конечными значениями и соответствуют режиму динамического торможения ДПТ НВ (рис.7.9).
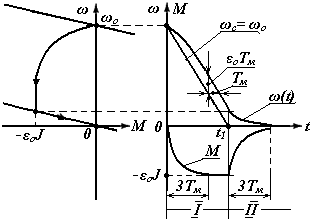
Рис.7.9 Механические характеристики и графики переходного
процесса при торможении вхолостую с w0(t) = -e0t