

Инкрементный энкодер
Контроллер (датчик) положения вращающегося объекта или по-другому энкодер - это электромеханическое устройство, с помощью которого можно определить положение вращающейся оси (вала). В данном устройстве механическое движение преобразовывается в электрические сигналы, определяющие положение объекта, дают информацию об угле поворота вала, его положении и направлении вращения. С помощью энкодера также можно измерить длину и расстояние или установить перемещение инструмента.
Энкодеры имеют широкую сферу применения в печатной промышленности, металлообработке, лифтовой технике, автоматах для фасовки, упаковки и розлива, в испытательных стендах, а также в роботах и прочих машинах, требующих точной регистрации показателей движения частей. Они практически полностью заменили широко распространенные ранее сельсины.
Импульсный (пошаговый) энкодер относится к типу энкодеров, которые предназначены для указания направления движения и/или углового перемещения внешнего механизма. Пошаговый энкодер периодически формирует импульсы, соответствующие углу вращения вала. Этот тип энкодеров, в отличие от абсолютных, не формирует выходные импульсы, когда его вал находится в покое. Пошаговый энкодер связан со счетным устройством, это необходимо для подсчета импульсов и преобразования их в меру перемещения вала.
Оптические
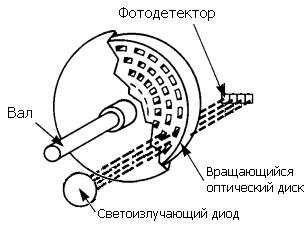
Рис 1. “Схема оптического энкодера”.
Пошаговый оптический энкодер состоит из следующих компонентов:
источника света,
диска с метками
фототранзисторной сборки
схемы обработки сигнала.
Диск пошагового энкодера подразделен на точно позиционированные отметки. Количество отметок определяет количество импульсов за один оборот. К примеру, если диск поделен на 1000 меток, тогда за 250 импульсов вал должен повернуться на 90 градусов.

Рис 2. “Диск с метками инкрементного энкодера”
Магнитные
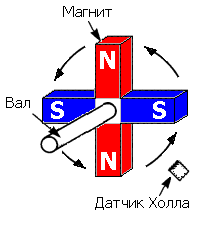
Рис 3. “Схема магнитного энкодера”.
Магнитный энкодер включает в себя вал с магнитом и датчиком Холла, который регистрирует последовательность прохождения магнитных полюсов (северные и южные) и измеряет скорость и направление вращения.
Магниторезистивные
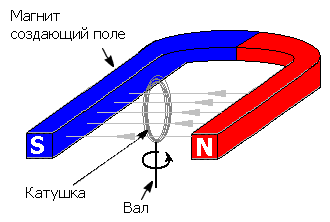
Рис 4. “Схема магниторезистивного энкодера”.
Магниторезистивный энкодер - катушка, помещенная в магнитное поле. Катушка закрепляется на валу. При вращении катушки ее витки будут изменять положение относительно поля, они будут то пералельны полю, то перпенликулярны, соответсвенно ток в катушке будут меняться. Таким образом, протекащий через катушку ток будут изменяться в зависимости от угла поворота вала.
Технология Квадратура выхода (выходы. А и в)
Для квадратуры выхода энкодера используются два выходных канала, для того чтобы определить - вращается вал по часовой стрелке или против часовой стрелки, основанное на сдвиге фазы 90°±0° , допуск ±45° - приемлемый для спецификации сдвига фазы. Энкодер с единственным выходом (A) более известен как тахометр.
Рис 5. “Максимальная частота ответа”
Максимальная частота ответа является частотой, при которой вращающийся энкодер может дать электрический ответ. Такая частота имеет отношение к количеству выходных импульсов, на которые энкодер реагирует в секунду. Следовательно, энкодер пошагового типа должен удовлетворить следующее отношение (rpm/60) x (разрешение) ≤ максимальной частоты ответа.