

8. Моделирование нервной системы (нейроны и нейронные сети) кибернетика и нервная система
Многое в работе нервной системы человека до сих пор непонятно ученым. Тем не менее общие закономерности управления, установленные кибернетикой, справедливы и для нее. Кибернетика разрабатывает математические приемы, позволяющие на основе внешних данных судить о поломке математической машины. Врач встречается с аналогичной задачей. На основе внешних признаков требуется установить характер заболевания. Основываясь на кибернетике, медицина использует разработанные ею методы для решения и этой задачи. Исследуя закономерности управления, общие для механизма и нервной системы, кибернетика должна оперировать понятиями, применимыми к тому и другому.
Как мозг, так и машина состоят из определенных элементов, которые в своей совокупности образуют единое целое — систему. Это можно сказать как о всем мире в целом, так и об отдельных его частях.
Искусственные управляющие устройства так же как мозг человека, относят к одному и тому же классу самоуправляющихся систем. Все такого рода самоуправляющиеся системы называют кибернетическими
Каждая система связана с внешним миром, который так или иначе влияет на нее и, в свою очередь, подвергается воздействиям с ее стороны. Ту часть системы, которая воспринимает воздействие извне, называют входом, а ту, которой система действует на другие системы, — выход ом.
В одной системе может быть один, два или несколько входов и выходов. Регулятор Уатта, например, имеет один вход и один выход. На входе происходит изменение давления, на выходе — открывание или закрывание клапана. Человек как система имеет множество входов и выходов в виде нервных клеток, воспринимающих внешние воздействия и реагирующих на них.
Всякая кибернетическая система, как указывалось выше, является самоуправляющейся.
Но управление не сводится просто к передаче информации от управляющей части системы к исполнительному органу. Этот процесс гораздо сложнее.
Дело в том, что на исполнительный орган влияет не только управляющая система. Он подвержен непрерывным воздействиям окружающей среды, которые часто препятствуют исполнению приказов, полученных от управляющего центра. Например, корабль может отклониться от прямого пути под влиянием неожиданно поднявшегося ветра. Что предпринять в этом случае? Очевидно, нужно повернуть руль корабля так, чтобы он мог держать прежний курс. Противодействие случайным внешним влияниям — общий закон всякого регулирования.
Самый надежный способ противодействовать внешним возмущениям — это сделать так, чтобы всякое отклонение фактического поведения от заданного, независимо от того, чем оно обусловлено, вызывало определенную ответную реакцию, направленную на ликвидацию этого отклонения. В таком случае не нужно изучать его причины, определять силу ветра, направление течения и т.д.; заданное направление поддерживается автоматически. Такой способ управления был найден. Нужно, чтобы кроме прямой связи устройства управления с исполнительной системой была обеспечена связь выхода исполнительной системы с входом управляющей (см. рис. 65). Эту дополнительную связь называют обратной.
Примеры обратной связи мы уже видели выше. Обратная связь, вызывающая в результате своего действия ослабление внешнего влияния, носит название отрицательной обратной связи. Принцип регулирования на основе отрицательной обратной связи находит применение в любой управляемой системе, будь то кибернетическая машина или живой организм.
Положение о том, что регулирование в живом организме, в том числе в центральной нервной системе человека, происходит на основе отрицательной обратной связи, иногда называют основной гипотезой кибернетики.
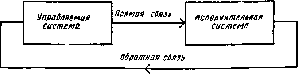 Рис.
65. Обратная связь
Рис.
65. Обратная связь
Общий для кибернетических машин и живых организмов принцип обратной связи неслучаен. Ведь и те и другие вынуждены действовать в постоянно меняющихся условиях, поэтому реакции, вырабатываемые у них, должны отличаться разнообразием. Но для этого необходимо, чтобы из рабочего органа в центральную систему поступали соответствующие сигналы. Обратная связь лежит в основе восстановления и перестройки функций центральной нервной системы.