

Взаимосвязанные системы регулирования. Системы связного регулирования. Автономные аср.
Объекты с несколькими входами и выходами, взаимно связанными между собой, называют многосвязными объектами, а их системы регулирования оказываются взаимосвязанными.
Существует два различных подхода к автоматизации многосвязных объектов: несвязанное регулирование отдельных координат с помощью одноконтурных АСР; связанное регулирование с применением многоконтурных систем, в которых внутренние перекрестные связи объекта компенсируются внешними динамическими связями между отдельными контурами регулирования.
Связанные системы регулирования включают кроме основных регуляторов дополнительные динамические компенсаторы.
Основой построения систем связанного регулирования является принцип автономности. Применительно к объекту с двумя входами и выходами понятие автономности означает взаимную независимость выходных координат г/i и ys при работе двух замкнутых систем регулирования.
По существу, условие автономности складывается из двух условий инвариантности: инвариантности первого выхода г/i по отношению к сигналу второго регулятора Хр2 и инвариантности второго выхода уч. по отношению к сигналу первого регулятора Хр1:
![]()
При этом сигнал Xpi можно рассматривать как возмущение для У 2, а сигнал Xps — как возмущение для у\. Тогда перекрестные каналы играют роль каналов возмущения (рис. 1.35). Для компенсации этих возмущений в систему регулирования вводят динамические устройства с передаточными функциями Ru(p) и К'д(р), сигналы от которых поступают на соответствующие каналы регулирования или на входы регуляторов.
Передаточные функции компенсаторов Ri2(p) и Rsi(p), определяемые из условия автономности, будут зависеть от передаточных функций прямых и перекрестных каналов объекта и в соответствии с выражениями (1.20) и (1.20,а) будут равны:
![]()
![]()
![]()
![]()
Так же, как в инвариантных АСР, для построения автономных систем регулирования важную роль играет физическая реализуемость и техническая реализация приближенной автономности.
Условие приближенной автономности записывается для реальных компенсаторов с учетом рабочих частот соответствующих регуляторов:
![]()
![]()
![]()
![]()
В химической технологии одним из самых сложных многосвязных объектов является процесс ректификации. Даже в простейших случаях — при разделении бинарных смесей в ректификационной колонне можно выделить несколько взаимосвязанных координат (рис. 1.36). Например, для регулирования процесса в нижней части колонны необходима стабилизация минимум двух технологических параметров, характеризующих материальный баланс по жидкой фазе и по одному из компонентов. Для этой цели обычно выбирают уровень жидкости в кубе и температуру под первой тарелкой, а в качестве регулирующих входных сигналов — расход греющего пара и отбор кубового продукта. Однако каждое из регулирующих воздействий влияет на оба выхода: при изменении расхода греющего пара изменяется интенсивность испарения кубового продукта, а вследствие этого—уровень жидкости и состав пара. Аналогично изменение отбора кубового продукта влияет не только на уровень в кубе, но и на флегмовое число, что приводит к изменению состава пара в нижней части колонны.
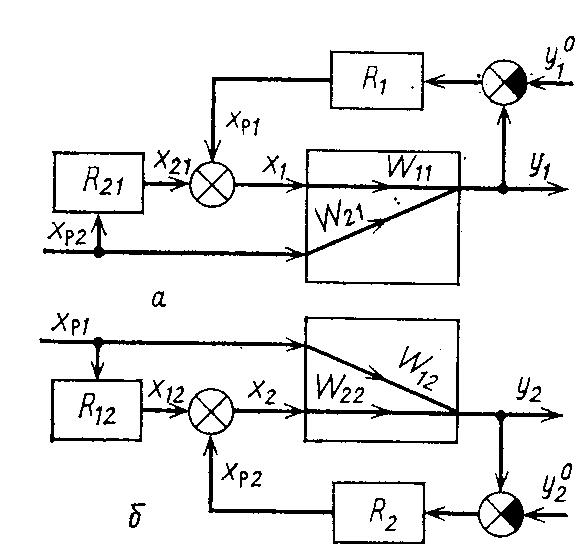
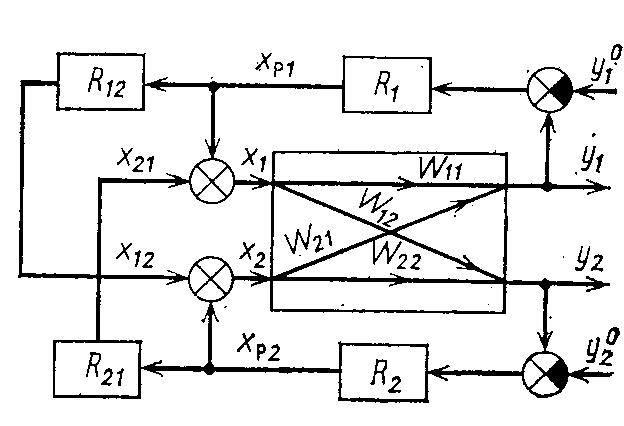
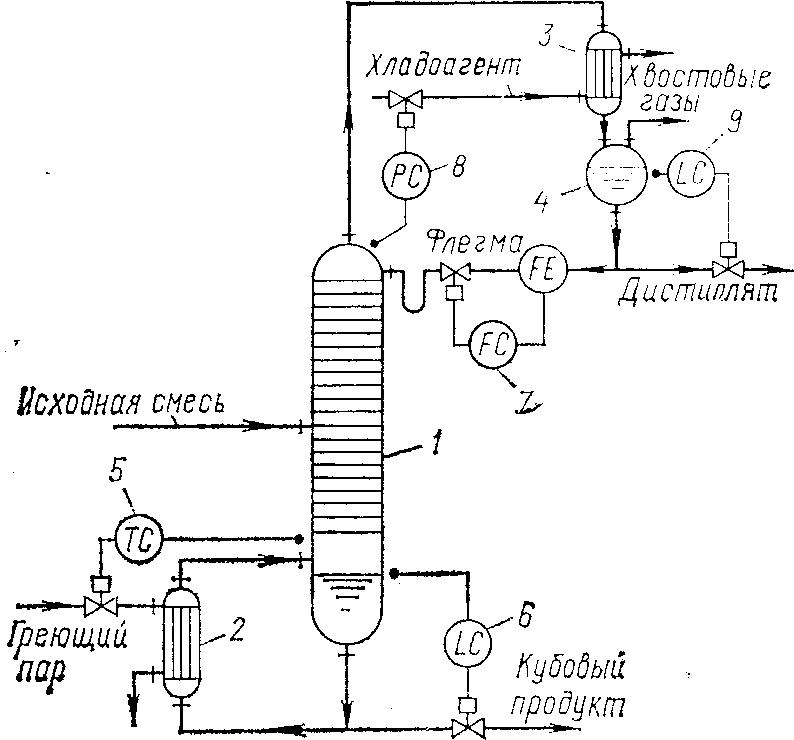
Рис. 1.35. Структурные схемы автономных АСР: а—компенсации воздействия от второго регулятора в первом контуре регулирования; б—компенсации воздействия от первого регулятора во втором контуре регулирования; в — автономной системы регулирования двух координат
Рис. 1.36. Пример системы регулирования объекта с несколькими входами и выходами:
1—ректификационная колонна; 2 — кипятильник; 3 — дефлегматор; 4—флегмовая емкость; 5— регулятор температуры; 6,9— регуляторы уровня; 7 — регулятор расхода; 8 — регулятор давления
Для регулирования процесса в верхней части в качестве выходных координат можно выбрать давление и температуру пара, а в качестве регулирующих входных параметров—подачу хладоагента в дефлегматор и флегмы на орошение колонны. Очевидно, обе входные координаты влияют на давление и температуру в колонне в ходе тепловых и массообменных процессов.
Наконец, рассматривая систему регулирования температуры одновременно в верхней и нижней частях колонны подачей соответственно флегмы и греющего пара, также получим систему несвязанного регулирования объекта с внутренними перекрестными связями.