

32. Типы входных сигналов. Особенности регулирования объектов с переменными параметрами. Классификация объектов регулирования. Типы входных сигналов.
Термин "переходный процесс" может означать реакцию системы регулирования на любой тип входного сигнала, однако, как правило, в качестве входного сигнала принимается ступенчатое возмущение заданного значения или нагрузки. Реакция системы на ступенчатое возмущение показывает, какая максимальная ошибка имеет место при данном произвольном изменении нагрузки. Ступенчатые являются одним из наиболее тяжелых видов возмущений.
Если требуется очень высокое качество работы системы, то следует определить реакцию системы на возмущающее воздействие с постоянной скоростью, на импульсное и синусоидальное воздействие или на возмущения иной формы; это исследование может оценить возможности системы регулирования.
Объект управления это динамическая система, параметры которой меняются под воздействием управляющих и возмущающих воздействий. Система является объектом управления (регулирования), когда имеет параметры, которые можно целенаправленно менять для достижения какого-то результата.
Управляющее воздействие - это группа параметров изменением которых оказывается целенаправленное влияние на объект.
Возмущающее воздействие - это переменные, изменение которых не связаны с воздействием системы на объект. Одним из существенных возмущений является изменение нагрузки. Под нагрузкой понимают количество вещества или энергии проходящее в единицу времени.
Классификация:
Объекты управления характеризуются различными признаками. Некоторые из них присущи в той или иной степени всем объектам, а некоторые характеристики индивидуальны и используются в качестве классификационных признаков
одномерные объекты (имеют один входной и выходной параметр);
многомерные объекты (имеют несколько контролируемых параметров);
Объекты сосредоточенными параметрами -- это объекты имеющие одинаковы значения в данный момент по всему объекту (объекты в плоскости)
Объекты с рассредоточенными параметрами
Еще одна классификация ‑ уравнение описания объекта, объекты могут быть:
одноемкостные; многоемкостные;
Общими для всех объектов является следующие признаки:
запаздывание; емкость; самовыравнивание;
Объекты бывают: Устойчивые, неустойчивые, нейтральные
Запаздывание ‑ выражает свойства системы, передавать сигнал со входа на выход не сразу, а через некоторый промежуток времени при этом характеристика сигнала не изменяется. Различают чистое запаздывание(транспортное) и емкостное (переходное).
Располагаемая работа и способы ее сохранения. Располагаемая работа обратимых процессов.
Из заданной массы очень горячей жидкости можно извлечь больше работы, чем из более холодной жидкости, даже если масса последней такова, что в ней содержится достаточное количество энергии по отношению к энергии окружающей среды. Горючий газ можно использовать для приведения в действие турбины или для обогрева помещения; в то же время воздух при 50° С может обогревать помещение, но его температура недостаточна для работы турбины. Следовательно, не нужно использовать горючий газ для обогрева помещений, а нужно сохранять его для таких процессов, в которых можно наилучшим образом использовать его располагаемую работу. Наоборот, можно обогревать помещения, используя жидкости, располагаемая работа которых невелика, например нагретой солнцем водой или отработавшим паром турбины.
Процессы, в которых используется или преобразуется энергия, также можно оценить, исходя из того, насколько эффективно в них сохраняется работа. Если физические ограничения можно лишь свести к минимуму путем тщательного изготовления узлов системы и т.п., то процессов, которые неэффективны по своей сущности, можно в известной степени избегать. Действительно, многие процессы специально делают неэффективными, чтобы с их помощью можно было управлять; например, тормоза используются для управления автомобилем.
Располагаемая работа и обратимые процессы.
Процесс, в котором состояние жидкости изменяется благодаря приложенной работе и в котором жидкость, возвращаясь в исходное состояние, может произвести такое же количество работы, называется обратимым. Примером обратимого процесса является процесс в идеальном компрессоре, работающем на идеальном газе. Работа, приложенная к компрессору, может повысить давление и температуру газа. Но если сжатый газ расширяется при истечении через отверстие и охлаждается до своего исходного состояния, работа не восстанавливается. Процесс расширения при истечении через отверстие и процесс теплопередачи теоретически необратимы. После введения термодинамических понятий тепла и работы можно определить такие процессы, которые необратимы по самой своей природе.
Рассмотрим тепловой двигатель, Количество тепла, отводимое в обратимом процессе, обозначается QR , а максимальная работа Ка : Wa=QR-M
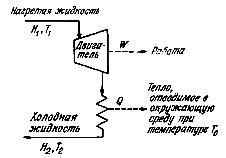
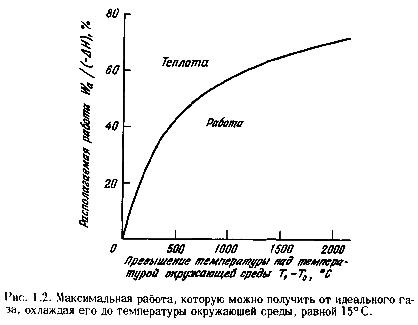
Рис 1.1.
Минимальное количество энергии, которое отводится в виде тепла, связано с изменением энтропии жидкости соотношением dQR = TdSR.
В полностью обратимом процессе энтропия системы, состоящей из рабочего тела и окружающей его среды, постоянна. Поэтому ее суммарное изменение равно нулю:∆SR + ∆S0 =П
Поскольку предполагается, что абсолютная температура окружающей среды Г0 постоянна, возрастание ее энтропии прямо пропорционально количеству поглощенного тепла Q0 : ∆S0=Q0/T0 = -QR/T0
Подставляя получаем зависимость располагаемой работы от изменения энтропии жидкости: Va=T0 ∆SR-M
Отметим, что эта кривая определяет максимальную работу, которую можно получить от идеального газа при постоянном давлении применительно к тепловому двигателю с обратимым рабочим процессом.