

23. Многоконтурные аср. Комбинированные аср. Аср с дополнительным импульсом по производной.
Для повышения качества регулирования необходим переход от одноконтурных АСР к более сложным системам, использующим дополнительные (корректирующие) импульсы по возмущениям или вспомогательным выходным координатам. Такие системы кроме обычного стандартного регулятора содержат вспомогательные регулирующие устройства — динамические компенсаторы или дополнительные регуляторы.
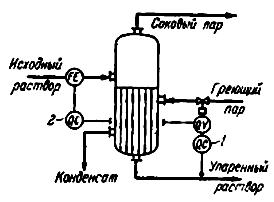
Рис. 1.7. Пример комбинированной системы регулирования концентрации упаренного раствора: 1—регулятор состава; 2—динамический компенсатор
В зависимости от характера корректирующего импульса различают следующие многоконтурные АСР: комбинированные, сочетающие обычный замкнутый контур регулирования с дополнительным каналом воздействия, по которому через динамический компенсатор вводится импульс по возмущению; каскадные—двухконтурные замкнутые АСР, построенные на базе двух стандартных регуляторов и использующие для регулирования кроме основной выходной координаты дополнительный промежуточный выход; с дополнительным импульсом по производной от промежуточной выходной координаты.
Комбинированные АСР
Комбинированные системы регулирования применяют при автоматизации объектов, подверженных действию существенных контролируемых возмущений.
На рис. 1.7 приведен фрагмент функциональной схемы автоматизации выпарной установки, в которой одним из наиболее сильных возмущений является расход питания. Основная задача регулирования—стабилизация концентрации упаренного раствора за счет изменения расхода греющего пара— выполняется регулятором 1. Кроме сигнала регулятора, на клапан, регулирующий подачу пара, через динамический компенсатор 2 поступает корректирующий импульс по расходу питания.
Сущ. два способа построения комбинированных АСР. Обе системы регулирования обладают общими особенностями: наличием двух каналов воздействия на выходную координату объекта и использованием двух контуров регулирования—замкнутого и разомкнутого. Отличие состоит лишь в том, что во втором случае корректирующий импульс от компенсатора поступает не на вход объекта, а на вход регулятора.
Основой расчета подобных систем является принцип инвариантности: отклонение выходной координаты системы от заданного значения должно быть тождественно равным нулю при любых задающих или возмущающих воздействиях. Для выполнения принципа инвариантности необходимы два условия: идеальная компенсация всех возмущающих воздействий и идеальное воспроизведение сигнала задания. Достижение абсолютной инвариантности невозможно поэтому ограничиваются частичной.
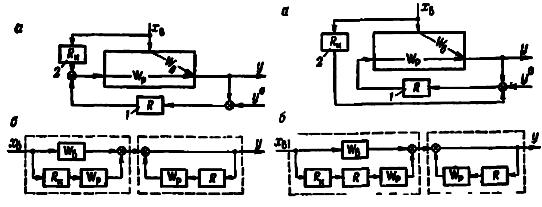
Рис. 1.9. Структурные схемы комбинированной АСР при подключении выхода компенсатора на вход объекта: а—исходная схема; б—преобразованная схема; 1—регулятор; 2—компенсатор. Рис. 1.10. Структурные схемы комбинированной АСР при подключении выхода компенсатора на вход регулятора: а—исходная схема; б—преобразованная схема; /—регулятор; 2 — компенсатор
АСР с дополнительным импульсом по производной из промежуточной точки
Такие системы обычно применяют при автоматизации объектов, в которых регулируемый технологический параметр (например, температура или состав) распределен по пространственной координате (как в аппаратах колонного или трубчатого типа). Особенность таких объектов состоит в том, что основной регулируемой координатой является технологический параметр на выходе из аппарата, возмущения распределены по длине аппарата, а регулирующее воздействие подается на его вход.
Подача на вход регулятора дополнительного импульса из промежуточной точки аппарата дает опережающий сигнал, и регулятор включается в работу прежде, чем выходная координата отклонится от заданного значения.
Для того чтобы обеспечить регулирование без статической ошибки, необходимо, чтобы в установившихся режимах дополнительный импульс исчезал. С этой целью вспомогательную координату пропускают через реальное дифференцирующее звено. При этом дифференцирующее устройство играет роль динамического компенсатора возмущения.
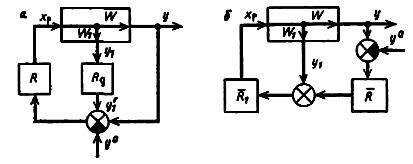
Рис. 1.29. Структурные схемы АСР с дополнительным импульсом по производной из промежуточной точки:а'— исходная схема; б — преобразованная к схеме каскадной АСР
В приведенной каскадной АСР на рис. 1.29,6 роль внешнего регулятора играет звено с передаточной функцией Ra^^p), а внутреннего — последовательно соединенные регулятор и дифференциатор:
![]()
![]() где
где
![]()
![]()