

22. Системы связного и несвязного регулирования.
Системы связанного регулирования.
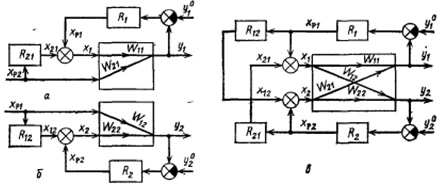
Объекты с несколькими входами и выходами, взаимно связанными между собой, называют многосвязными объектами (рис. 1.30).
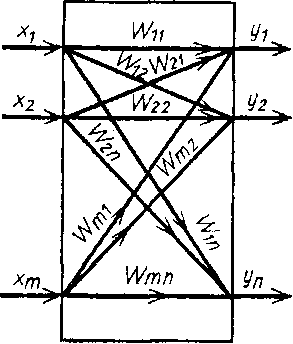
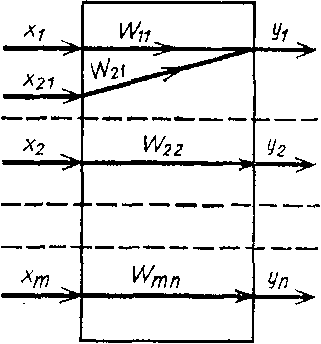
Рис. 1.30. Схемы объектов с несколькими входами и выходами:
а — со взаимосвязанными коодинатами; б — односвязные объекты
Динамика многосвязных объектов описывается системой дифференциальных уравнений, а в преобразованном по Лапласу виде — матрицей передаточных функций.
Существует два различных подхода к автоматизации многосвязных объектов: несвязанное регулирование отдельных координат с помощью одноконтурных АСР; связанное регулирование с применением многоконтурных систем, в которых внутренние перекрестные связи объекта компенсируются внешними динамическими связями между отдельными контурами регулирования.
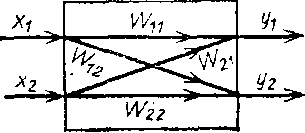
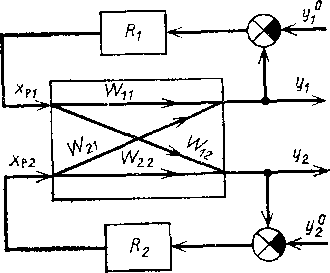
Рис. 1.31. Схема объекта с двумя взаимосвязанными координатами
Чтобы предотвратить возможность взаимного раскачивания. Связанные системы регулирования включают кроме основных регуляторов дополнительные динамические компенсаторы.
Основой построения систем связанного регулирования является принцип автономности. Понятие автономности означает взаимную независимость выходных координат у1 и у2 при работе двух замкнутых систем регулирования.
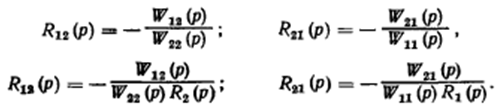
Условие автономности складывается из двух условии инвариантности: инвариантности первого выхода у1 по отношению к сигналу второго регулятора хр2 и инвариантности второго выхода у2 по отношению к сигналу первого регулятора хр1:
![]()
При этом сигнал хр1 можно рассматривать как возмущение для у2, а сигнал хр2 — как возмущение для у1. Тогда перекрестные каналы играют роль каналов возмущения (рис).
Для компенсации этих возмущений в систему регулирования вводят динамические устройства с передаточными функциями R12(p) и R21(p), сигналы от которых поступают на соответствующие каналы регулирования или на входы регуляторов. Передаточные функции компенсаторов R12(p) и R21(p), будут зависеть от передаточных функций прямых и перекрестных каналов объекта и будут равны:
Системы несвязанного регулирования. Структурная схема системы.
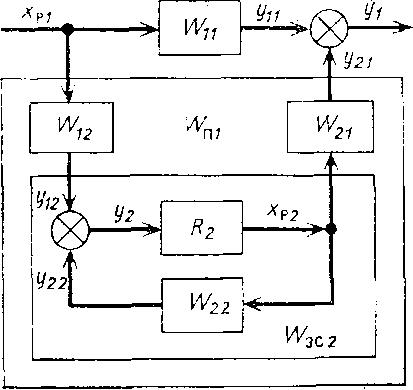
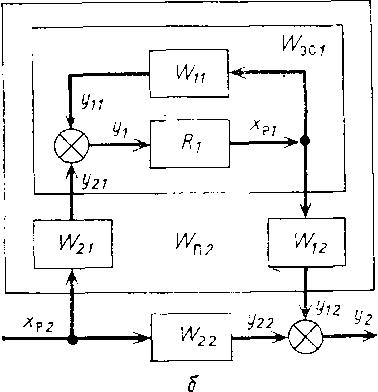
Рис. 1.33. Преобразование системы регулирования двух координат к эквивалентным одноконтурным АСР: —экв. объект для первого регулятора; б—экв. объект для второго регулятора.
Выведем передаточную функцию эквивалентного объекта в одноконтурной АСР с регулятором Ri. Такой объект состоит из основного канала регулирования и связанной с ним параллельно сложной системы, включающей второй замкнутый контур регулирования и два перекрестных канала объекта.
Передаточная функция эквивалентного объекта имеет вид:
![]()
Второе слагаемое в правой части уравнения (1.36) отражает влияние второго контура регулирования на рассматриваемую систему и по существу является корректирующей поправкой к передаточной функции прямого канала.
![]()
На основе этих формул можно предположить, что если на какой-то частоте модуль корректирующей поправки будет пренебрежимо мал по сравнению с амплитудно-частотной характеристикой прямого канала, поведение эквивалентного объекта на этой частоте будет определяться прямым каналом.
Для оценки взаимного влияния контуров
регулирования используют комплексный
коэффициент связанности, который обычно
вычисляют на нулевой частоте и на рабочих
частотах регуляторов w1
и w2. В частности, при w=0
значение Kcв определяется
отношением коэффициентов усиления по
перекрестным и основным каналам:
![]()
Если на этих частотах Kcв=0, объект можно рассматривать как односвязпый; при Kсв>1 целесообразно поменять местами прямые и перекрестные каналы («перекрестное» регулирование); при 0<Kcв<1 расчет одноконтурных АСР необходимо вести по передаточным функциям эквивалентных объектов.