13. Основные понятия систем управления и автоматизации. Постановка задачи управления и регулирования.
При определения некот. объекта как системы предполагается наличие: 1) объекта (системы), сост. из множества элементов и их свойств, кот. рассматриваться, как единое целое благодаря связям между ними и их свойствами; 2) исследователя и, выполняющего любую целенаправленную деятельность; 3) задачи решения кот. исследователь определяет некоторый объект как систему; 4) языка, на кот. исследователь может описать объект, свойства его элементов и связи.
Элементы ‑ это части или компоненты системы, условно принятые неделимыми.
Свойства ‑ качества позволяющие, описать систему и выделять ее среди других систем.
Связи ‑ это то, что соединяет элементы и свойства.
Целостность системы проявляется в том, что ее свойства могут качественно отличаться от свойств составляющих элементов.
система ‑ это не сумма составляющих ее частей, целостное образование с новыми свойствами, которыми не обладают ее элементы.
Моделью системы называют отображение определенных характеристик объекта с целью его изучения. центральной проблемой моделирования является разумное упрощение модели, т.е. выбор степени подобия модели и объекта.
Любой целенаправленный процесс — организованную совокупность операций, которые условно можно разделить на две группы: рабочие операции и операции управления.
Рабочие операции ‑ это действия, необходимые непосредственно для выполнения процесса в соответствии с природой и законами, определяющими ход течения процесса.
Для достижения цели процесса рабочие операции должны организовываться и направляться действиями другого рода ‑ операциями управления. Совокупность операций управления образуют процесс управления. В структурном аспекте любую систему управления можно представить взаимосвязанной совокупностью объекта управления и управляющего органа
Обобщенная структура системы управления
Объект управления — открытую систему, находится в дин. взаимодействии с внешней средой. Влияние внешней среды на объект управления носит неконтролируемый характер и выражается в случайном изменении его состояния. Задачу управления: найти такие вектор управления и вектор состояния, которые обеспечат достижение цели управления, согласно какого-то критерия управления.
![]()
![]()
На практике достижение точного значения цели управления обеспечить трудно. Достаточно, чтобы модуль разности между достигнутым значением показателя цели управления Jk и значением J не превышало некоторое значение заданной величины
задачу управления: найти и
реализовать функциональную зависимость
(алгоритм управления)
![]() ,обеспечивающих
наилучшее приближение к заданному
значению критерия управления.
,обеспечивающих
наилучшее приближение к заданному
значению критерия управления.
Задача упрощается, если цель управления задается как вектор желаемого состояния х*(t), т.е. план и программа управления известны и могут быть сообщены системе заранее. Критерий управления формулируется следующим образом
![]() (1)
(1)
Это частный случаем задачи
называется задачей регулирования.
Строго задача регулирования формулируется
следующим образом: полагая заданным
х*(t),
найти закон регулирования
![]() ,который
обеспечивает экстремум критерию (1)
,который
обеспечивает экстремум критерию (1)
Процесс управления условно можно разбить на совокупность следующих функций:
‑ планирование и определение программы управления;
‑ контроль;
‑ формирование управляющих воздействий или принятия решения;
‑ реализаци управляющего воздействия или решения.
Определение программы управления заключается в выработке траектории решения системы х*(t) в пространстве параметров его состояния.
Контроль состоит в измерении значений компонентов вектора состояния х(t) и определении вектора ошибки (t).
Формирование управляющего воздействия (принятия решения) заключается в определении значений управляемых переменных, приводящих объект управления в желаемое состояние.
Реализация управляющих воздействий ‑ это непосредственно физическое воздействие на объект управления.

Функциональная схема системы управления

Схема системы регулирования
16. Фильтрация: -- жидких систем. Объект управления – барабанный вакуумфильтр. Условие – обеспечение min влажности осадка. Устройство регулирования – для обеспечения определенного уровня суспензии в ванне. Регулирующее воздействие – изменение расхода суспензии.
С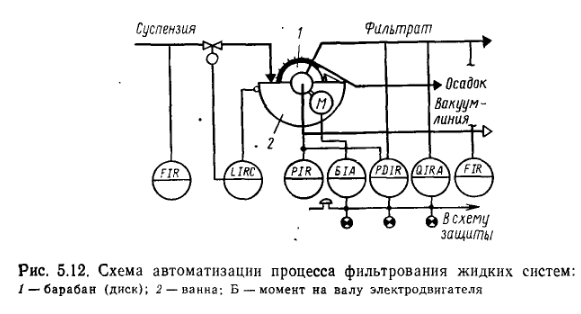 ерьезная
опасность при работе – прорыв
фильтровальной ткани (будет теряться
целевой продукт). Для предотвращения—устанавливают
датчики мутности фильтра, устройства
сигнализации и защиты, датчик перегрузки
электродвигателя барабана.
ерьезная
опасность при работе – прорыв
фильтровальной ткани (будет теряться
целевой продукт). Для предотвращения—устанавливают
датчики мутности фильтра, устройства
сигнализации и защиты, датчик перегрузки
электродвигателя барабана.
Контролю подлежат расходы суспензий и фильтрата, уровень жидкости в ванне, разрежение в вакуум-линии, перепад давления до и после фильтровальной ткани, мутность фильтрата, мощность электродвигателя.
Важный параметр – толщина осадка.
Газовых систем: Объект управления – рукавный фильтр с импульсной продувкой.
Р укавные
фильтры – для полной очистки газа от
вредных в-в, являющихся ценным продуктом,
поэтому показатель эффективности –
конц-я твердого в-ва в газе на выходе из
фильтра, а цель управления – поддержание
его на заданном уровне. Процесс аналогичен
предыдущему. Сложности – отсутствие
концентратомеров пыли. Поэтому регулируют
перепад давления в камере загрязненного
и очищенного газа. Регулировать можно
изменением массы пыли, осевшей на
фильтровальной ткани. Кроме датчика
перепада давления – по жесткой временной
программе. Контролю и сигнализации
подлежат – Тем-ра загрязненного газа,
давление сжатого воздуха и перепад
давления. При критических значениях
перепада давления – срабатывает
устройство защиты, отключающее рабочий
фильтр и включающий резервный. Контролю
подлежит расход газового потока.
укавные
фильтры – для полной очистки газа от
вредных в-в, являющихся ценным продуктом,
поэтому показатель эффективности –
конц-я твердого в-ва в газе на выходе из
фильтра, а цель управления – поддержание
его на заданном уровне. Процесс аналогичен
предыдущему. Сложности – отсутствие
концентратомеров пыли. Поэтому регулируют
перепад давления в камере загрязненного
и очищенного газа. Регулировать можно
изменением массы пыли, осевшей на
фильтровальной ткани. Кроме датчика
перепада давления – по жесткой временной
программе. Контролю и сигнализации
подлежат – Тем-ра загрязненного газа,
давление сжатого воздуха и перепад
давления. При критических значениях
перепада давления – срабатывает
устройство защиты, отключающее рабочий
фильтр и включающий резервный. Контролю
подлежит расход газового потока.
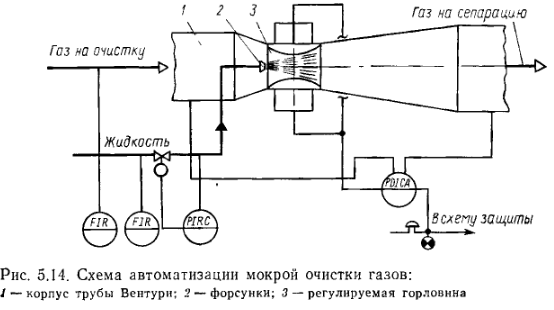
Мокрая очистка газов: Объект
управления – форсуночная труба Вентури,
в которой жидкость под небольшим
давлением попадает через распылитель,
установленный параллельно газовому
потоку, движущемуся с большой скоростью.
 Движение
газа в трубе – как движение газа через
слой капель жидкости со скоростью,
равной относительной скорости фаз.
Следовательно, конечная конц-я пыли
зависит от числа и размера капель,
определяющих качество фильтра, и от
расхода газа. Жидкость дробится на капли
в трубе 2 раза: на крупные – при истечении
жидкости из форсунок и на более мелкие
– под действием энергии газа. Диаметр
капель после форсунки при распыливании
жидкости в газе зависит от геометрических
размеров форсунки и давления жидкости.
Движение
газа в трубе – как движение газа через
слой капель жидкости со скоростью,
равной относительной скорости фаз.
Следовательно, конечная конц-я пыли
зависит от числа и размера капель,
определяющих качество фильтра, и от
расхода газа. Жидкость дробится на капли
в трубе 2 раза: на крупные – при истечении
жидкости из форсунок и на более мелкие
– под действием энергии газа. Диаметр
капель после форсунки при распыливании
жидкости в газе зависит от геометрических
размеров форсунки и давления жидкости.
Движущая сила процесса – перепад давления на трубе, поэтому его стабилизация обеспечивает качественную дисперсность распыла, постоянство расхода газа. Для эффективного применения трубы – нужно регулировать давление жидкости перед форсункой и перепад давления газа. Сигнализация – предельное значение перепада давления. Контроль – расход ж-ти и газа.
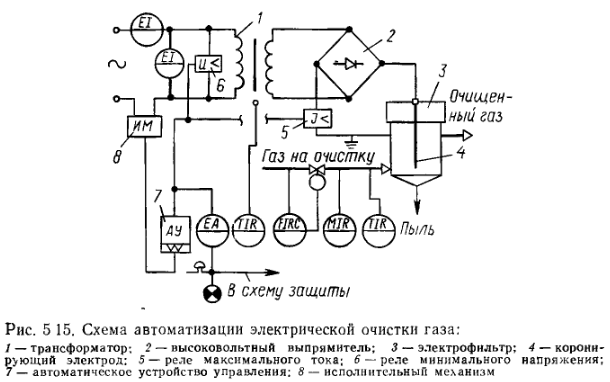
Электрическая очистка газа: на примере сухого Эл.фильтра.
Параметры от которых зависит конц-я пыли на выходе: напряжение питания, нагрузка, температура газа, радиус частиц, давление газа, влажность, удельное эл. Сопротивление. Контроль – расход, температура и влажность газа, напряжение и сила тока, температура масла трансформаторно-вычислительного блока.