

7) Стратегия диспетчеризации на базе расширения rtx (Real Time extension)
Самый надежный и распространенный алгоритм диспетчеризации в многозадачных операционных системах (ОС) – алгоритм циклической диспетчеризации, когда для выполнения конкретной задачи предоставляется некоторый квант времени. По истечении каждого кванта времени планировщик просматривает очередь активных задач и принимает решение, которой из них передать управление.
На рис. представлены
многоуровневая структура Windows
NT
с RTX
и размещение основных потоков
системы управления. 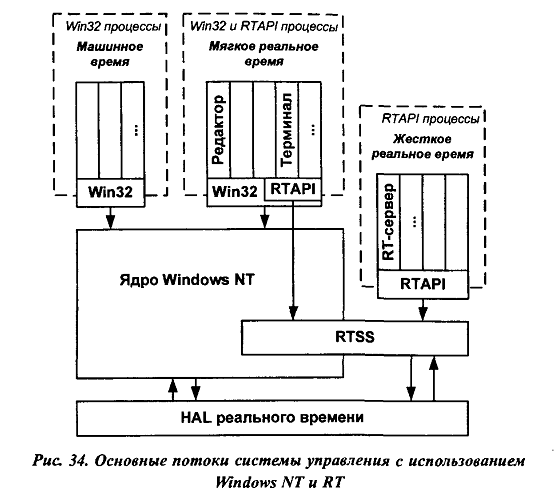
Внизу находится уровень аппаратной абстракции реального времени (HAL), где реализованы быстродействующие часы и таймеры, механизм разграничения прерываний между RTX и Windows NT. Подсистема реального времени RTSS выполнена в виде драйвера, работает на уровне ядра Windows NT и обеспечивает основные функции и упр-е ресурсами RTX. Использует сервисные возможности HAL реального времени и Windows NT для работы с быстрыми часами и таймерами и для обслуживания механизма прерывания. Встроенный в RTSS менеджер потоков и планировщик, основанные на фиксированной системе приоритетов, управляют прикладными задачами. Подсистема RTSS обеспечивает интерфейс между процессами RTX и Windows NT в реальном времени с помощью специального сервисного механизма IPC.
В системе работают обычный прикладной
интерфейса Win32 для Windows
NT,
а также дополнительные
прикладные интерфейсы реального времени
RTAPI
и Win32 RT.
Дополнительные прикладные
интерфейсы обеспечивают два режима
реального времени: «жесткий» и «мягкий».
В режиме жесткого реального времени
решаются критические задачи,
реализованные в процессе
RT-сервер; в
режиме мягкого реального времени
решаются задачи, непосредственно
связанные с задачами реального времени;
они реализованы в процессе «терминал»,
в режиме
машинного времени работают остальные
стандартные прикладные
модули системы управления 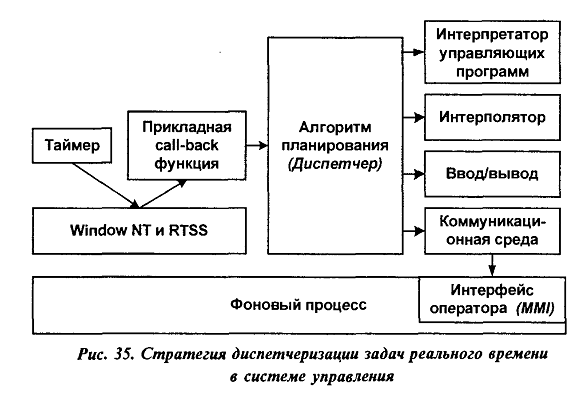
Первоначально в Windows с RTSS создается таймер. По истечении кванта времени стандартный механизм генерирует прерывание, которое обрабатывается прикладной call-back функцией (функцией обратного вызова). Функция реализует алгоритм планирования (диспетчеризации) задач интерпретаций, интерполяции, ввода-вывода, коммуникации и интерфейса оператора MMI. В жестком реальном времени – задачи диспетчеризации, интерполяции, ввода-вывода, коммуникации. В мягком – задачи интерпретации и обновления экранов интерфейса с оператором, а в фоновом процессе-задачи интерфейса с оператором.
8) Принцип разбиения потоков (threads) в системе управления и схема их диспетчеризации
В системах управления целесообразно придерживаться схемы «один процесс - много потоков». «+»: быстродействие и высокая реактивность.
3 группы потоков:
жесткого реального времени, работающие в процессе реального времени -это так называемые RTSS-процессы;
мягкого реального времени, функционирующие в Win32- и RTAPI-процессах;
машинного времени, работающие в стандартных Win32-npoueccax.
Обмен данными и синхронизация процессов машинного времени и мягкого реального времени традиционны, это осуществляется на базе общей платформы Win32. Обмен данными между процессами мягкого и жесткого реального времени осуществляется на базе разделяемой памяти - механизма, предоставляемого со стороны RTX.
Процесс RTSS на рис. 36 включает в себя набор потоков, решающих критические задачи в системе управления. Поток диспетчера call-back функцией таймера, в которой реализован планировщик процессов.
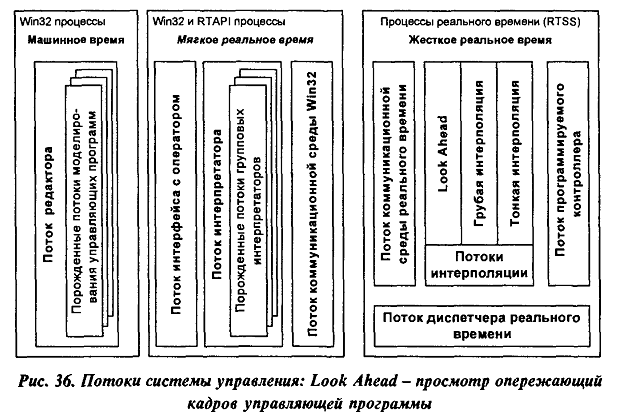
Коммуникационную среду разделим на два потока, один –функционирует в режиме жесткого реального времени, а другой работает в режиме мягкого реального времени. Задача состоит в передаче данных как между потоками внутри процесса, так и между процессами. Передача данных между потоками коммуникационной среды реального времени и потоками коммуникационной среды Win32 осуществляется посредством разделяемой памяти.
Задача интерполяции реализуется потоком Look Ahead, осуществляющим опережающий просмотр и коррекцию кадров управляющей программы, потоком грубой интерполяции, вызываемым обычно с частотой 50 Гц, и потоком тонкой интерполяции, вызываемым обычно с частотой 1-2 мс, осуществляющим сплайновую интерполяция между точками, рассчитанными в рамках грубой интерполяции. Поток программируемого контроллера решает задачу управления электроавтоматикой и задачу ввода-вывода.
В процессе мягкого реального времени, помимо Win32 и потока интерпретации кадров управляющей программы, работает поток интерфейса с оператором. В потоке интерфейса с оператором отображаются текущие координаты, скорость подачи, состояние процесса, режимы системы управления. Отсюда же отправляются управляющие команды процессу реального времени. Процессы машинного времени-это классические Windows-процессы.