

23. Многоконтурные аср. Комбинированные аср. Аср с дополнительным импульсом по производной.
большинству промышленных объектов химической технологии свойственны значительное чистое запаздывание и большие постоянные времени. В таких случаях даже при оптимальных настройках рег-в одноконтурные АСР характеризуются большими дин. ошибками, низкой частотой регулирования и длительными ПП. Для повышения качества рег-я необходим переход от одноконтурных АСР к более сложным системам, использующим доп. импульсы по возмущениям или вспомогательным вых. координатам. Такие системы кроме стандартного регулятора содержат вспомогательные регулирующие устройства — динамические компенсаторы или дополнительные регуляторы.
В зависимости от характера корректирующего импульса различают следующие многоконтурные АСР: комбинированные, сочетающие обычный замкнутый контур регулирования с доп. каналом воздействия, по кот. через динамический компенсатор вводится импульс по возмущению; каскадные—двухконтурные замкнутые АСР, построенные на базе двух стандартных регуляторов и использующие для регулирования кроме основной выходной координаты дополнительный промежуточный выход; с дополнительным импульсом по производной от промежуточной выходной координаты.
Комбинированные АСР
применяют при автоматизации объектов, подверженных действию существенных контролируемых возмущений.
Основой расчета подобных систем является принцип инвариантности: отклонение выходной координаты системы от заданного значения должно быть тождественно = нулю при любых задающих или возмущающих воздействиях. Для выполнения два условия: идеальная компенсация всех возмущающих воздействий и идеальное воспроизведение сигнала задания.
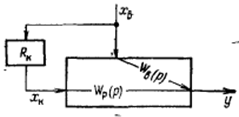
Рис. 1.11. Структурная схема разомкнутой АСР.
условие инвариантности разомкнутой и комбинированной систем регулирования по отношению к одному возмущающему воздействию. Условие инвариантности разомкнутой и комбинированной АСР. Рассмотрим условие инвариантности разомкнутой системы (рис. 1.11): y(t)=0.
Переходя к изображениям по
Лапласу Х(р)
и Y(p)
сигналов Хв(1)
и y(t),
перепишем это условие с учетом передаточных
функций объекта по каналам возмущения
Ws(p)
и регулирования Wp(p)
и компенсатора Рк(р)
![]()
При наличии возмущения
[Хв(р)=^0]
условие инвариантности (1.19) выполняется,
если
![]() откуда
откуда
![]()
для обеспечения инвариантности системы регулирования по отношению к какому-либо возмущению необходимо установить динамический компенсатор, передаточная функция которого равна отношению передаточных функций объекта по каналам возмущения и регулирования, взятому с обратным знаком.
условия инвариантности для комбинированных АСР. Для случая, когда сигнал от компенсатора подается на вход объекта структурная схема комбинированной АСР преобразуется к последовательному соединению разомкнутой системы и замкнутого контура
![]()
![]()
При этом условие инвариантности (1.19) записывается в виде
![]()
![]()
Если должно выполняться условие
![]()
![]()
АСР с дополнительным импульсом по производной из промежуточной точки
применяют при автоматизации объектов, в которых регулируемый техн. параметр распределен по пространственной координате. Особенность таких объектов — основной регулируемой координатой является тех. параметр на выходе из аппарата, возмущения распределены по длине аппарата, а регулирующее воздействие подается на его вход.
Подача на вход регулятора дополнительного импульса из промежуточной точки аппарата дает опережающий сигнал, и регулятор включается в работу прежде, чем выходная координата отклонится от заданного значения.
Для того чтобы обеспечить регулирование без статической ошибки, необходимо, чтобы в установившихся режимах дополнительный импульс исчезал. Для этого вспомогательную координату пропускают через реальное диф. звено. Эф-ть введения доп. импульса зависит от точки его отбора. Выбор последней определяется в каждом конкретном случае дин. свойствами объекта и условиями его работы. Так, измерение у\ в начале аппарата равносильно дополнительному импульсу по возмущению, которое поступает по каналу регулирования. При этом дифференцирующее устройство играет роль динамического компенсатора возмущения. Для каждого объекта можно выбрать оптимальное место отбора дополнительного импульса, при котором качество регулирования оказывается наилучшим.
Расчет подобных систем регулирования аналогичен расчету каскадных АСР после соответствующих преобразований.