

22. Системы связного и несвязного регулирования.
Системы связанного регулирования.
Объекты с несколькими входами и выходами, взаимно связанными между собой, называют многосвязными объектами.
При отсутствии перекрестных связей, когда каждый вход влияет лишь на один выход, многосвязпые объекты распадаются на односвязные.
Динамика многосвязных объектов описывается системой диф.уравнений, а в преобразованном по Лапласу виде — матрицей передаточных функций.
Существует два различных подхода к авт-и многосвязных объектов: несвязанное регулирование отдельных координат с помощью одноконтурных АСР; связанное регулирование с применением многоконтурных систем, в которых внутренние перекрестные связи объекта компенсируются внешними динамическими связями между отдельными контурами регулирования.
Чтобы предотвратить возможность взаимного раскачивания, одноконтурные АСР следует рассчитывать с учетом внутренних связей и других контуров регулирования.
Связанные системы регулирования включают кроме основных регуляторов дополнительные динамические компенсаторы.
Основой построения систем связанного регулирования является принцип автономности. Применительно к объекту с двумя входами и выходами понятие автономности означает взаимную независимость выходных координат у1 и у2 при работе двух замкнутых систем регулирования.
Условие автономности складывается из 2 условии инвариантности: инвариантности первого выхода у1 по отношению к сигналу второго регулятора хр2 и инвариантности второго выхода у2 по отношению к сигналу первого регулятора хр1:
![]()
При этом сигнал хр1 можно рассматривать как возмущение для у2, а сигнал хр2 — как возмущение для у1. Тогда перекрестные каналы играют роль каналов возмущения.
Для компенсации этих возмущений в систему регулирования вводят динамические устройства с передаточными функциями R12(p) и R21(p), сигналы от которых поступают на соответствующие каналы регулирования или на входы регуляторов. Передаточные функции компенсаторов R12(p) и R21(p), будут зависеть от передаточных функций прямых и перекрестных каналов объекта и будут равны:
Для построения автономных систем регулирования важную роль играет физическая реализуемость и техническая реализация приближенной автономности.
Системы несвязанного регулирования. Структурная схема системы представлена на рис. 1.32.

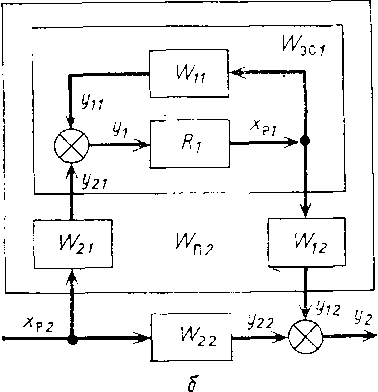
Рис. 1.33. Преобразование системы регулирования двух координат к эквивалентным одноконтурным АСР: —эквивалентный объект для первого регулятора; б—эквивалентный объект для второго регулятора.
Выведем передаточную функцию эквивалентного объекта в одноконтурной АСР с регулятором Ri. Как видно из рис. 1.33, а, такой объект состоит из основного канала регулирования и связанной с ним параллельно сложной системы, включающей второй замкнутый контур регулирования и два перекрестных канала объекта.
Передаточная функция эквивалентного объекта имеет вид:
![]()
Второе слагаемое в правой части уравнения (1.36) отражает влияние второго контура регулирования на рассматриваемую систему и по существу является корректирующей поправкой к передаточной функции прямого канала.
![]()
На основе этих формул можно предположить, что если на какой-то частоте модуль корректирующей поправки будет пренебрежимо мал по сравнению с амплитудно-частотной характеристикой прямого канала, поведение эквивалентного объекта на этой частоте будет определяться прямым каналом.
Наиболее важно значение поправки на рабочей частоте каждого контура. В частности, если рабочие частоты двух контуров регулирования wpi и wр2 существенно различны, то можно ожидать, что взаимное влияние их будет незначительным при условии
![]()
![]()
Наибольшую опасность представляет случай, когда инерционность прямых и перекрестных каналов приблизительно одинакова. Пусть, например, Wn(p) = Wiz(p) = W4i(p) = W-2i(p)=W(p). Тогда для эквивалентных объектов при условии, что Ri(p) =Рз(р)'=К(р), получим:
передаточные функции
![]()
частотные характеристики
![]()
![]()
![]()
откуда W (((о) R (ко) =0,5; | R (to) | = 0,5/ | W (ко) [ .
Для качественной оценки
взаимного влияния контуров регулирования
используют комплексный коэффициент
связанности, который обычно вычисляют
на нулевой частоте (т. е. в установившихся
режимах) и на рабочих частотах регуляторов
w1
и w2.
В частности, при w=0
значение Kcв
определяется отношением коэффициентов
усиления по перекрестным и основным
каналам:
![]()
Если на этих частотах Kcв=0, объект можно рассматривать как односвязпый; при Kсв>1 целесообразно поменять местами прямые и перекрестные каналы («перекрестное» регулирование); при 0<Kcв<1 расчет одноконтурных АСР необходимо вести по передаточным функциям эквивалентных объектов.