

ВыполнениЕ лабораторных работ
Необходимые предварительные навыки и знания
Перед тем, как начать выполнение лабораторных работ, студент должен:
Внимательно ознакомиться с требованиями по технике безопасности (см. главу 3. Требования по технике безопасности).
Изучить «Руководство пользователя» NI ELVIS II (входит в комплект поставки NI ELVIS II)
Понимать принципы работы электрических схем и основы управления электродвигателями
Изучить методику проведения лабораторных работ.
Ознакомиться с теоретическими материалами по теме, чтобы четко представить задачу которую надо выполнить(см. раздел 9. ЛИТЕРАТУРА).
Работа с платой микропривод
Плата МИКРОПРИВОД разделена на зоны 1-6 (Рис. 8.2 -5), предназначенные для выполнения определенных операций.
В каждой зоне имеются контактные площадки и переключатели, через которые можно производить электрические соединения для подачи напряжений и токов, а также для передачи полученных сигналов устройству NI ELVIS IIдля измерений.Эти действия относятся только к проведению лабораторных работ для аппаратного выполнения. Электрические подключения производятся студентом при помощи соединительных проводов и переключателей, вставляемых в контактные гнезда согласно приведенным в лабораторной работе инструкциям.

Рис. 8.2‑4 Соединительные провода
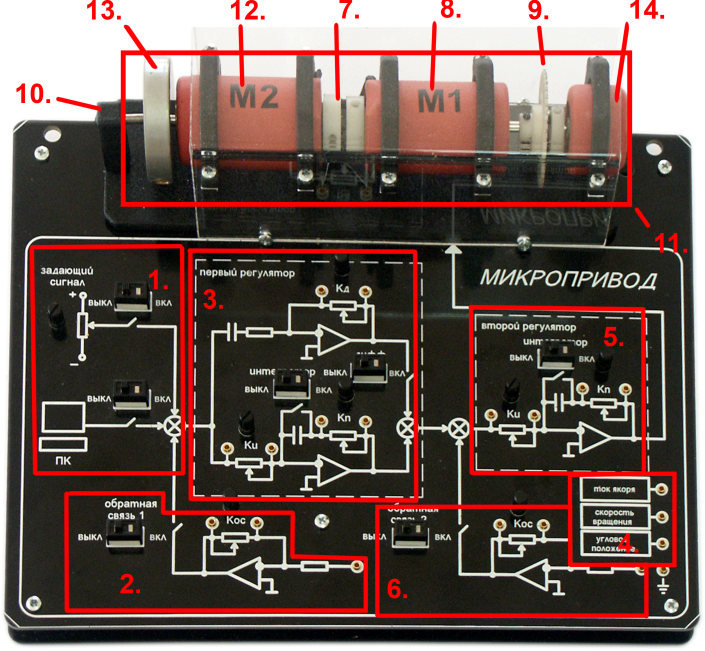
Рис. 8.2‑5.Зонына плате МИКРОПРИВОД
Ниже приведены функциональные назначения отмеченных зон:
Зона коммутации управляющих сигналов.
Зона каналаобратной связи для первого регулятора.
Зона первого регулятора типа ПИД.
Зона сигналовдатчиков
Зона второго регулятора типа ПИ.
Зона каналаобратной связи для второго регулятора.
Соединительная муфта валов микродвигателей.
Исследуемый микродвигатель.
Датчик углового положения вала микродвигателя.
Держатель маховика, используемый после его снятия с вала микродвигателя.
Зона микродвигателей.
Микродвигатель, использованный в качестве механической нагрузки.
Маховик для увеличения инерционности микропривода.
Датчик скорости вращения4.
Включение и подготовка к работе
Если платформа NI ELVIS II выключена, включите ее при помощи выключателя, расположенногона торце устройства в задней части, рядом с разъемом для подключения кабеля питания (см. Рис. 8.3 -6).

Рис. 8.3‑6 Выключатель питания NI ELVIS II
Сначала должен загореться желтый светодиод USBActive (4),затем через несколько секунд, после того, как компьютер распознает устройство,он потухнет и загорится желтый светодиод USBReady (3) на Рис. 8.3 -7:

Рис. 8.3‑7 Выключатель питания платы и индикаторы
После включения питания платформы NI ELVIS IIна экране компьютера откроется мастер выбора устройства сбора данных (Рис. 8.3 -8), просто щелкните по кнопке Cancel,чтобы закрыть это окно.

Рис. 8.3‑8Мастер устройства сбора данных
Включите выключатель питания платы (1)наРис. 8.3 -8, при этом должен загореться зеленыйсветодиод PROTOTYPING BOARD POWER (2).
Операции с маховиком
В левой части зоны микродвигателей на плате расположен механизм маховика, необходимый для выполнения некоторых лаборатоных работ (см. Рис. 8.4 -9).


Рис. 8.4‑9Механизм маховика
–держатель
– фиксирующий винт
– вал двигателя
– маховик
– стопорный винт
– отверстие стопорного винта
Для всех лабораторных работ без маховика, маховик должен быть снят с вала двигателя, помещен на держатель и закреплен фиксирующим винтом.
Снимите прозрачный защитный кожух.
Для установки маховика на вал двигателя, ослабьте фиксирующий винт (2), переместите маховик (4) с держателя (1) на вал двигателя (3) и закрепите фиксирующим винтом.
Для установки маховика на ось держателя ослабьте фиксирующий винт (2), переместите маховик (4) свала двигателя (3) на ось держателя (1) и закрепите фиксирующим винтом.
При выполнении определенных лабораторных работ возникнет необходимость зафиксировать маховик в неподвижном положении. Для этого установите маховик (4) на вал двигателя, закрепив его фиксирующим винтом (2), затем застопорите его стопорным винтом (5), введя последний в отверстие стопорного винта (6) на маховике.
Установите прозрачный защитный кожух.
-
Внимание:все действия, связанные с установкой на вал, фиксацией или снятием маховика, необходимо производить при выключенных электродвигателях (ключи К1 и К2на лицевой панели должны быть разомкнуты).Нельзя касаться маховика в процессе вращения.
Важно: в процессе проведения любой лабораторной работы маховик, или открытый конец вала, на который устанавливается маховик, должен быть защищен прозрачным кожухом.