Исследование динамических характеристик двухконтурной сау угловым положением ротораДпт
Цель лабораторной работы
Приобрести навыки настройки аналоговой двухконтурной замкнутой САУ угловым положением вала микродвигателя (МД) применением традиционных ПИД и ПИ регуляторов;
Исследовать зависимость качества переходных процессов в замкнутой системе от параметров и настроек контуров системы.
Результатом работы должны быть:
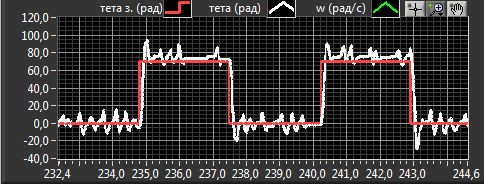
- скриншот переходных процессов реакции настроенной двухконтурной системы на скачок задания;
- качественный анализ полученных переходных процессов;
Выполнение лабораторной работы
Для выполнения лабораторной работы необходимо выбрать в меню строку “Исследование динамических характеристик двухконтурной САУ угловым положением ротора ДПТ”, в правом нижнем углу открывшейся лицевой панели представлены подробные инструкции по выполнению.
Чтобы начать работу, нажмите кнопку “Старт”.
Установите все ключи на плате в положение "Выкл", а потенциометры переведите в крайнее левое положение. Убедитесь в наличии маховика на валу и в случае отсутствия установите его, зафиксировав винтом на торце. Установите на плате перемычку между входом усилителя второй обратной связи (обратная связь 2) и гнездом "скорость вращения".
Включите ключи “сигнал задания от ПК” и "обратная связь 2".
Нажмите по кнопке "Продолжить", щелчком по кнопке К1 активизируйте управление МД1, щелкните по радио-кнопке “slider”, и слайдером U1 установите задающий сигнал 6В.
Включите интегратор второго регулятора. При этом начнется резкое возрастание скорости МД1.
Вращением потенциометра "Кос" (обратная связь 2) снизьте скорость до уровня сигнала задания.
С помощью потенциометра "Кп" второго регулятора измените коэффициент пропорциональности для устранения возможных автоколебаний скорости.
Снова проверьте уровни графиков заданной и реальной скорости МД1, и в случае несоответствия выровняйте их, медленно изменяя Кос. Совпадение уровней означает, что Кос был установлен верно.
В окне “Выбор задания” установите следующие опции сигнала задания:
тип сигнала = square
частота = 0.2
амплитуда = 3.0
смещение = 3.0.
щелкните по радио-кнопке “waveform”.
Дождитесь стабильного циклического повторения переходного процесса.
Изменяяпостоянную времени второго регулятора потенциометром "Ки" устраните возможные колебания скорости двигателя. По окончании нажмите "Пауза".

НАСТРОЙКА внешнего КОНТУРА
Установите на плате перемычку между входом усилителя первой обратной связи и гнездом "угловое положение". Включите ключ "обратная связь 1".
Нажмите кнопку "Вкл. граф.тэта".
Нажмите кнопку "Продолжить", щелчком по кнопке К1 активизируйте управление МД1, щелкните по радио-кнопке “slider”, и ползунком U1 установите задающий сигнал 70 рад.
Вращением потенциометра " " (обратная связь 1) приведите график сигнала угла вращения МД1 (тета) к заданному слайдером уровню (тета з.)
В окне “Выбор задания” установите следующие опции:
щелкните по радио-кнопке “waveform”
тип сигнала = square
частота = 0.1
амплитуда = 35
смещение = 35.
Дождитесь стабильного циклического повторения переходного процесса.
Скорректируйте график переходного процесса изменением коэффициента пропорциональности первого регулятора (потенциометр " "). В этом случае для установки коэффициента можно использовать и потенциометр " " первого регулятора.
Нажмите кнопку "Пауза". Пользуясь методикой, описанной вразделе “Пример” главы 8.6Запуск программы и проведение лабораторных работ, стр. 23, определите время переходного процесса и перерегулирование.