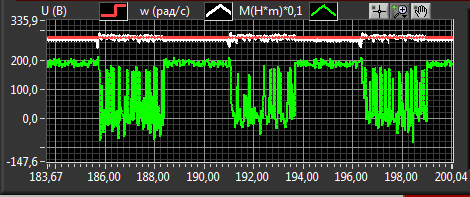
Заключительный скриншот после выполнения лабораторной работы
Исследование динамических характеристик двухконтурной сау скоростью дпт
Цель лабораторной работы
Приобрести навыки настройки аналоговой двухконтурной системы с ПИД и ПИ регуляторами;
Исследовать зависимость качества переходных процессов в замкнутой системе от параметров и настроек контуров системы.
Результатом работы должны быть:
- скриншот переходных процессов реакции системы с ПИД и ПИ регуляторами на скачки задания и нагрузки;
- качественный анализ полученных переходных процессов;
- сравнительный анализ графиков переходных процессов замкнутой и разомкнутой систем.

График изменения момента
Выполнение лабораторной работы
Для выполнения лабораторной работы необходимо выбрать в меню строку “Исследование динамических характеристик двухконтурной САУ скоростью ДПТ”, в правом нижнем углу открывшейся лицевой панели представлены подробные инструкции по выполнению.
Чтобы начать работу, нажмите кнопку “Старт”.
Настройка контура тока (внутренний контур)
Все ключи на плате установите в положение "выкл", а потенциометры переведите в крайнее левое положение. Убедитесь в наличии маховика на валу и в случае отсутствия установите его, зафиксировав винтом на торце. Установите перемычку между входом усилителя второй обратной связи (обратная связь 2) и гнездом "ток якоря"(параметр момент на графике пропорционален току якоря).
Включите на плате ключи “сигнал задания от ПК” и "обратная связь 2".
Настройка контура тока производится при неподвижном роторе. Застопорите ротор микродвигателя при помощи стопорного винта (см. пункт 8.4Операции с маховиком, стр.16).
Нажмите кнопку "Продолжить", щелчком по кнопке К1 активизируйте управление МД1, в окне “Выбор задания”щелкните по радио-кнопке “slider”, и ползунком U1 установите задающий сигнал 5В.
Включите интегратор второго регулятора.
Вращением потенциометра "Кос" (обратная связь 2) приведите график тока якоря к заданному уровню, совместив на графике значение тока с сигналом задания.
В окне “Выбор задания” установите следующие опции сигнала задания:
тип сигнала = square
частота = 0,5
амплитуда = 2
смещение = 2
щелкните по радио-кнопке “waveform”.
Дождитесь стабильного циклического повторения переходного процесса.
С помощью потенциометров "Ки" и "Кп" устраните возможный шум тока.
Нажмите кнопку "Пауза" и освободите ротор.
Настройка контура скорости
Установите перемычку на плате между входом усилителя первой обратной связи (обратная связь 1) и гнездом "скорость вращения".
Настройте контур скорости. Для этого включите ключ "обратная связь 1".
Нажмите кнопку "Продолжить", щелчком по кнопке К1 активизируйте управление МД1, в окне “Выбор задания”щелкните по радио-кнопке “slider”, и слайдером U1 установите задающий сигнал 4В.
Включите интегратор первого регулятора.
Вращением потенциометра "Кос" (обратная связь 1) снизьте скорость до уровня сигнала задания.
С помощью потенциометра "Ки" измените постоянную времени интегратора для устранения возможных автоколебаний скорости.Если колебания не прекратились, измените коэффициент пропорциональности вращением потенциометра "Кп".
Снова проверьте уровни графиков заданной и реальной скорости МД1, и в случае несоответствия выровняйте их, медленно изменяя Кос. Совпадение уровней означает, что Кос установлен верно.
В окне “Выбор задания” установите следующие опции:
тип сигнала = square
частота = 0.5
амплитуда = 2.0
смещение = 2.0
щелкните по радио-кнопке “waveform”.
Дождитесь стабильного циклического повторения переходного процесса.
Изменяйте коэффициент пропорциональности первого регулятора потенциометром "Кп" и добейтесь минимального перерегулирования и стабильного сигнала скорости в установившихся режимах.
Изменяйте постоянную времени интегратора (потенциометр "Ки") в сторону уменьшения времени переходного процесса, до появления автоколебаний скорости. Возникшие колебания устраните изменением коэффициента Кп. Далее, поочерёдным изменением Ки и Кп, добейтесь переходного процесса с минимальным временем и перерегулированием.
Нажмите кнопку “Пауза”.
Используя графические инструменты, измерьте время переходного процесса и вычислите постоянную времени замкнутой системы, и сравните с постоянной времени разомкнутой системы полученной в работе 2.1 "Определение динамических характеристик разомкнутой САУ скоростьюДПТ".

Нажмите кнопку “Продолжить”, затем K1.
Проверьте систему на воздействие нагрузки. Для этого в окне “Выбор задания” выберите “slider”
ползунком U1 установите задающий сигнал 6В.
В окне “Выбор нагрузки” установите следующие опции сигнала нагрузки:
тип сигнала = square
частота = 0.5
амплитуда = 2.0
смещение = 4.0
щелкните по радио-кнопке “waveform”.
Нажатием кнопки К2 активируйте двигатель МД2. Дождитесь стабильного циклического повторения переходного процесса и проведите оценку переходных процессов. Нажмите кнопку “Пауза”.