

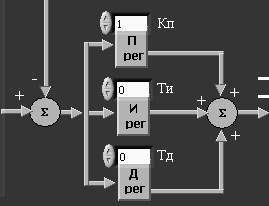
Заключительный скриншот после выполнения лабораторной работы
Динамические системы с различными регуляторами,программное исполнение
Исследование динамических характеристик одноконтурной сау скоростью дпт
Краткие теоретические сведения
Основные показатели качества переходных процессов

Рис. 9.3‑20 График, иллюстрирующий основные показатели качества переходного процесса.
 - установившееся значение выходной
величины.Установившееся значение
выходной величины Yуст определяется по
переходной характеристике, представленной
на Рис. 9.3 -20.
- установившееся значение выходной
величины.Установившееся значение
выходной величины Yуст определяется по
переходной характеристике, представленной
на Рис. 9.3 -20.
Ψ – степень затухания.
 (1)
(1)
где
 и
и  –
соответственно амплитуды 1-го и 3-го
максимумов переходной характеристики
(Рис. 9.3 -20)
–
соответственно амплитуды 1-го и 3-го
максимумов переходной характеристики
(Рис. 9.3 -20)
 –
время достижения первого максимума
–
время достижения первого максимума
Время достижения первого максимума tmax определяется по переходной характеристике, представленной на Рис. 9.3 -20.
 –
времярегулирования (время,
закотороеколебанияконтролируемой
переменнойперестают превышать 5% от
установившегося значения)
–
времярегулирования (время,
закотороеколебанияконтролируемой
переменнойперестают превышать 5% от
установившегося значения)
Время регулирования определяется согласно Рис. 9.3 -20 следующим образом:
Находится допустимое отклонение
 .Например,
задается
.Например,
задается
Строится «зона» шириной
 (см. Рис. 9.3 -20).
(см. Рис. 9.3 -20).
Время соответствует последней точке пересечения
 с границей зоны.
с границей зоны.
 –
ошибка регулирования
–
ошибка регулирования
Статическая ошибка
регулирования  ,
где
,
где  - входная величина (см. Рис. 9.3 -20).
- входная величина (см. Рис. 9.3 -20).
Обозначим перерегулирование –Y. При отработке ступенчатого воздействия (по сигналу задания) – см. Рис. 9.3 -20величина перерегулирования определяется по формуле:
 (2)
(2)
где значения
величин  и
определяются согласно Рис. 9.3 -20.
и
определяются согласно Рис. 9.3 -20.
Настройка системы с пропорциональным (П) регулятором
Рассчитаем статизм разомкнутой системы. При максимальном задании на напряжение, номинальном моменте и единичном коэффициенте Кп (Прег)статизм в процентах будет:
 (3)
(3)
Тогда коэффициент усиления пропорционального регулятора получится:
 (4)
(4)
где:
- активное сопротивление якорной цепи (получено в лабораторной работе Лабораторная работа №1);
 - момент
сопротивления на валу двигателя (примем
- момент
сопротивления на валу двигателя (примем
 мН*м);
мН*м);
 -
коэффициент электромеханического
преобразования (получен в лабораторной
работе 1.2;
-
коэффициент электромеханического
преобразования (получен в лабораторной
работе 1.2;
 -
заданный (желаемый) статизм системы (в
данной работе рекомендуемое значение
-
заданный (желаемый) статизм системы (в
данной работе рекомендуемое значение
 );
);
 -
коэффициент усиления преобразователя
(
-
коэффициент усиления преобразователя
( );
);
 -
максимальное напряжение задания (
-
максимальное напряжение задания ( В).
В).
Поскольку формула
(3) не учитывает динамику системы, данный
коэффициент может привести к чрезмерной
колебательности и даже к неустойчивости
системы. Поэтому после проверки системы
на скачок задания величину
 в
случае необходимости нужно уменьшить.
в
случае необходимости нужно уменьшить.
Отметим, что все рассчитанные настройки регуляторов не являются окончательными. Обычно для получения окончательной настройки расчетные значения берутся в качестве базовых, и на основании последующих испытаний производится корректировка.
Ниже представлен пример последовательности скриншотов при настройке системы с пропорциональным (П) регулятором без маховика и с маховикомисходя из заданного статизма системы.
Система с маховиком:


Система без маховика:


Ниже представлен
пример последовательности скриншотов
при настройке системы с пропорциональным
(П) регулятором без маховика и с
маховикомисходя из соотношения основной
постоянной времени (механической)
системы -
 и времени запаздывания –
.
и времени запаздывания –
.
Система с маховиком:


Система без маховика:


Настройка системы с пропорционально-интегральным (ПИ) регулятором
Цель настройки – свести статическую ошибку к нулю и увеличить быстродействие системы путем компенсации наибольшей постоянной времени системы.
Если электрическая
постоянная времени мала по сравнению
с механической, двигатель представляет
из себя инерционное звено с передаточной
функцией
Введем в прямой канал управления ПИ-регулятор с передаточной функцией:
 (5)
(5)
где:
 -
полная механическая постоянная времени
системы;
-
полная механическая постоянная времени
системы;
 -
коэффициент усиления разомкнутой
системы
-
коэффициент усиления разомкнутой
системы ;
;
 -
коэффициент усиления двигателя по
скорости;
-
коэффициент усиления двигателя по
скорости;
 -
заданная (желаемая) постоянная времени
системы
-
заданная (желаемая) постоянная времени
системы
 порядка
порядка
 ;
;
- время задержки (чистого запаздывания) системы.
Тогда замкнутая система с ПИ-регулятором при единичной отрицательной обратной связи будет иметь передаточную функцию:
 ,
,
где
 –
заданная желаемая
постоянная времени.
–
заданная желаемая
постоянная времени.
Коэффициенты регуляторов, с учетом не единичного коэффициента обратной связи, будут:
 ;
;
 (6)
(6)
Ниже представлена последовательность скриншотов при настройке системы с пропорционально-интегральным (ПИ) регулятором без маховика и с маховиком.
Пример системы с маховиком:


Пример системы без маховика:


Настройка системы с пропорционально-интегрально-дифференциальным (ПИД) регулятором
Способ поочередной настройки регуляторов:
При и
и
 равных нулю, принимаем
равных нулю, принимаем и постепенно увеличивая
и постепенно увеличивая
 ,
добиваемся автоколебаний в системе.
Фиксируем граничный коэффициент
,
добиваемся автоколебаний в системе.
Фиксируем граничный коэффициент
 .
.

Принимаем

При
 и
принятом
,
принимаем
и
принятом
,
принимаем постепенно
уменьшая
постепенно
уменьшая
 ,
добиваемся автоколебаний в системе.
Фиксируем граничное значение
,
добиваемся автоколебаний в системе.
Фиксируем граничное значение
 .
.

Принимаем

Припринятых
и
,
постепенно увеличивая
с
нулевого значения, добиваемся автоколебаний
в системе. Фиксируем граничное значение
 .
.


Принимаем

Настройка ПИД-регулятора методом Циглера-Николса
Для настройки
данным методом необходимо вначале для
замкнутой системы при разомкнутых И- и
Д- регуляторах определить граничное
значение
 ,
соответствующее
,
при котором начинаются автоколебания,
а также период этих автоколебаний –
,
соответствующее
,
при котором начинаются автоколебания,
а также период этих автоколебаний –
 .
.
Затем по таблице, исходя из типа выбранного регулятора, рассчитываются соответствующие коэффициенты.
В Табл.1 приведены формулы расчета ПИД регулятора для случая, когда передаточная функция:
 (7)
(7)
Табл.1
-
N
Тип регулятора



1
П

-
-
2
ПИ


-
3
ПИД



Если регулятор имеет вид, представленный ниже:
то коэффициенты пересчитываются следующим образом:
 ;
;
 ;
;
 (8)
(8)
Вариант без маховика
Убедимся в отсутствии
маховика, выставим
 ,
,
,
,
 и начнем постепенно (рекомендуемый шаг
0.1) увеличивать
.
Добившись устойчивых автоколебаний,
запишем их период –
.
и начнем постепенно (рекомендуемый шаг
0.1) увеличивать
.
Добившись устойчивых автоколебаний,
запишем их период –
.

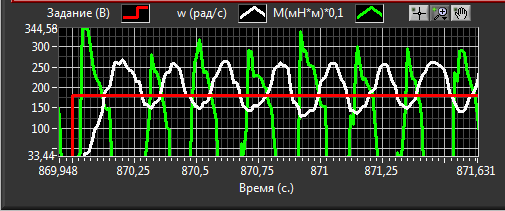
Увеличиваем масштаб графика и определяем период автоколебаний .
Затем начнем
уменьшать
,
пока колебания не станут затухающими.
Запишем
 .
.

По Табл.1 и формулам пересчета (8) рассчитаем коэффициены регуляторов , и .
Установим коэффициенты регуляторов по полученным данным и запустим систему.
