

Лабораторная работа №4. Изучение релейных систем управления. Определение режимов и параметров автоколебаний. Знакомство с фазовым портретом.
Цель: Изучить релейные системы. Ознакомиться с различными режимами релейных систем.
Задача: Изучить систему управления с релейным регулятором. Изучаются режимы автоколебаний системы и влияние параметров регулятора на них.
Идентификации подлежит зависимость уровня в баке от расхода жидкости. Модель должна строиться в виде передаточной функции.
Для выполнения работы используется стенд «Основы АСУТП».
Интерфейс программы показан на рис.26.
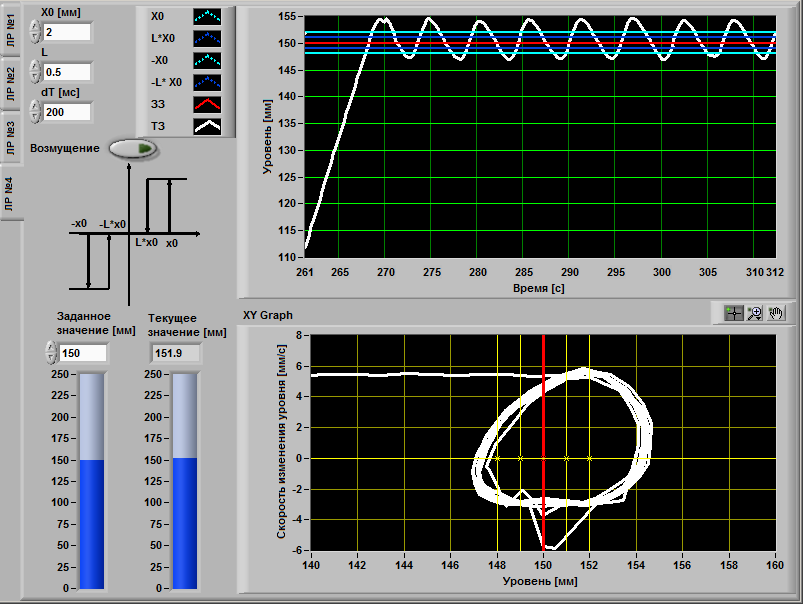
Рис. 26. Интерфейс программы для ЛР №4
Последовательность действий:
На вкладке «ЛР №1» Установить переключатель баков в нужное положение. Ввести нулевой уровень шума. Перейти на вкладку «ЛР №4».
Установить «Заданное значение» на некотором уровне. Ознакомиться с работой системы управления.
Изменяя параметры регулятора добиться возникновения автоколебаний в системе. Найти граничные значения параметров регулятора, при которых отсутствуют автоколебания.
Определить размах и частоту автоколебаний. Ознакомиться с фазовым портретом автоколебаний.
Ввести параметры регулятора, при которых отсутствуют автоколебания. Включить «Возмущение». При этом в системе возникает небольшой расход, регулятор же поддерживает заданный уровень в баке. Возможно ли в такой системе устранение автоколебаний?
Изменить период работы дискретной системы управления. Для этого изменить значение dT[мс] на 800. Оценить граничные значения параметров регулятора, при которых отсутствуют автоколебания. Сделать вывод о влиянии периода работы регулятора на точность регулирования.
На вкладке «ЛР №1» ввести ненулевой уровень шума. Найти параметры регулятора, которые обеспечивают устойчивое управление без возникновения автоколебаний. Оценить влияние шума на точность управления.
Литература:
Зайдель А.Н. Погрешности измерений физических величин. - Л.: Наука, 1985.
Тэйлор Дж. Введение в теорию ошибок. - М.: Мир, 1985.
Весничева Г.А. и др. Обработка результатов измерений. Методические указания. – СПб: 2003.
Льюнг Леннарт. Идентификация систем. – М.: Наука, 1991.
Интеллектуальные системы автоматического управления. / Под ред. И.М. Макарова, В.М. Лохина – М.: Физматпит, 2001.
В.О. Толкачев, Т.В. Ягодкина. Методы идентификации одномерных линейных динамических систем. – М.: МЭИ, 1997.
К.А. Алексеев. Моделирование и идентификация элементов и систем автоматического управления. – Пенза, 2002.
С.В. Шелобанов. Моделирование и идентификация систем управления. – Хабаровск, 1999.
А.А. Игнатьев. Основы теории идентификации динамических объектов. – Саратов, 1999.
Цыпкин Я.З. Релейные автоматические системы. – М.: Наука, 1974.
Цыпкин Я.З., Попков Ю.С. Теория нелинейных импульсных систем. – М.: Наука, 1973.