

11.3.2. Защита от вибрации
Линейные вибросистемы состоят из элементов массы, упругости и демпфирования. В общем случае в системе действуют силы инерции, трения, упругости и вынуждающие.
Сила энерции, как известно, равна произведению массы Мна ее ускорение
d t
где v — виброскорость.
Сила /^направлена в сторону, противоположную ускорению.
Упругий элемент принято изображать в виде пружины, не имеющей массы (рис. 11.35, а). Чтобы переместить конец пружины из точки с координатой х0 (ненапряженное соотношение) в точку с координатой хи к пружине необходимо приложить силу; при этом сила действия упругого элемента, или восстанавливающая сила, будет направлена в противоположную сторону и равна
Fg=Gx, (11.41)
где G — коэффициент жесткости, Н/м; х = х{— х0 — смещение конца пружины, м.
При вибрации упругих систем происходит рассеяние энергии в окружающую среду, а также в материале упругих элементов и в узлах сочленения деталей конструкции. Эти потери вызываются силами трения — диссипативными силами, на преодоление которых непрерывно и необратимо расходуется энергия источника вибрации.
рис.
11.35. Схематическое изображение
элементов упругости (а)
и демпфирования
(б)

Fs = Sv. (11.42)
Сила Fs всегда направлена против скорости, коэффициент S{Н с/м) называют импедансом, или сопротивлением элемента демпфирования.
Основные характеристики виброзащитных систем. К основным характеристикам виброзащитных систем отнесены собственная частота системы, механический импеданс и коэффициенты, определяющие процессы затухания вибраций и рассеяния энергии1.
По аналогии с формулой (11.42) можно ввести общее понятие механического импеданса материальной точки при гармонической вибрации
z = F/y или \z\=\F/% где комплексное число z в полярной форме можно записать в виде
Найдем импеданс элементов массы и упругости. При заданной виброскорости v смещение х и ускорение а материальной точки находят интегрированием и дифференцированием:
\ = \те,ш; x = v / (усо); а= /иv. (11.43)
13*
387
Об
- M
Ft
\,
Fs
Fm
F0
Подставив ускорение а в формулу (11.40), определяют импеданс элемента массы, или просто импеданс массы zM\
rdv
(11.44)
FM=M—- = j<*M = zM v. at
Таким образом, импеданс массы zM является
мнимой положительной величиной, пропорциональной частоте. Он достигает больших значений в диапазоне высоких частот. В диапазоне низких частот им можно пренебречь.
Подставив смещение х в формулу (11.41), находят импеданс элемента упругости zG'
(11.45)
- Gx = — v = zG v . >
Таким образом, импеданс элемента упругости zG = -j— является чисто мнимой
со
отрицательной величиной, обратно пропорциональной частоте; в области высоких частот им можно пренебречь.
Импеданс элемента демпфирования является действительной величиной
Zs = S\ Fs = isy.
В общем случае вибросистему с одной степенью свободы можно изобразить в виде элемента массы, не обладающего деформацией, и элементов упругости и демфирова- ния, не имеющих массы (рис. 11.36). Точка О обозначает положение статического равновесия, от которого отсчитывается смещение jc тела массой М под действием гармонической вынуждающей силы Fr К телу также приложены сила инерции FM, восстанавливающая сила Fg и диссипативная демпфирующая сила Fs. В соответствии с принципом Д'Аламбера
Fu+Fn+F,= Ff.
(11.46)
Свободная вибрация (Ft = 0) в отсутствие сил трения (Fs = 0) с течением времени не затухает. Виброскорость в этом случае определяется выражением (11.43), в котором амплитуда vm = const. Условие FM + FG = 0c учетом выражений (11.44) и (11.45) позволяет определить собственную частоту вибросистемы:
со 0=jG/M.
Собственную частоту системы с одной степенью свободы (см. рис. 11.35, а) на практике определяют по прогибу А, исходя из равенства сил FG = FM в статике:
со0 М = yjg/А ,
где g — ускорение свободного падения.
При наличии сил трения (Fs ф 0) свободная вибрация (Ft = 0) затухает. Амплитуда виброскорости с течением времени убывает. Чтобы учесть это, вводят комплексную угловую частоту со, = со0. +у8, где 8 — коэффициент демпфирования. Поставив в выражение (11.43) частоту со. вместо со, получим
v = уш е-ф v) = ут (8)e/(<Bo*'+(Pv), (11.47)
где vm(8) = vme 5t — амплитуда виброскорости с учетом затухания.
Из уравнения FM+ FG + Fs= (j й>,М—jG/<Ь„ + S)\ = 0 находят неизвестные величины 8 и оа0..
5 = S/2M,
k |
1- |
/ \ S |
2~ |
\м |
Ар у |
|
где 5кр = 2 4GM — критический импеданс элемента демпфирования.
Таким образом, коэффициент демпфирования равен половине импеданса элемента демпфирования, приходящегося на единицу массы, и свободная вибрация с затуханием осуществляется с частотой ю0„ зависящей от отношения импедансов S/SKp, которое характеризует силы трения в системе. При отсутствии диссипативных сил (S/SKp = .0) частота оэ0. = оэ0; если же диссипативные силы имеют критическое значение, т. е. если S/SKp = 1, то частота оэ0. = 0.
Вынужденная вибрация (F{ * 0) происходит с частотой ю вынуждающей силы. Из уравнения (11.46) определяют механический импеданс вибросистемы:
z= S + j(oM-jG/(o. (11.48)
Таким образом, импеданс вибросистемы складывается из импедансов элемента демпфирования, массы и упругости. Он имеет активную и реактивную составляющие. Его модуль и фазовый угол равны:
z Н % = <sJ$2+(c*M-G/G))2, (11.49)
<pz = arctg[(o)M— G/co)/S\.
Как следует из соотношения (11.49), импеданс вибросистемы имеет минимальное значение на частоте ю = со0, при которой слагаемое в круглых скобках обращается в нуль, т. е. в резонансной области импеданс вибросистемы определяется импедансом элемента демпфирования (z = S). Вне резонансной области импедансом S можно пренебречь. Тогда из выражения (11.48) следует, что в диапазоне высоких частот движение определяется вибрирующей массой (z « jcoM), а в диапазоне низких частот — жесткостью системы (z ® — y'G/©).
Защитное устройство — упругодемпфирующий элемент. В большинстве случаев расчет сложных защитных устройств сводится к расчету простого защитного устройства, состоящего из элемента упругости и элемента демпфирования, соединенных параллельно. Реакция
<
F(x,v)
f
с
У/
Рис.
11.37. Рассеяние энергии — гистерезисная
петля
(11.50)
Zr = ZS+ ZG= (S-jG/co).
Если провести циклическое деформирование уп- ругодиссипативного элемента по закону х = xwcosoo^ то обнаруживается различие линий нагрузки и разгрузки (рис. 11.37) на диаграмме сила — смещение: точка, изображающая напряженное и деформированное состояние, описывает замкнутую кривую — петлю гистерезиса. Площадь, ограниченная петлей гистерезиса, выражает энергию еЛ рассеянную за один цикл демпфирования и равную работе диссипативных сил:
т
£s = §Fr(x, v)dx = Ji^ (v)vdf = nx1m(o3.
В начале и конце цикла деформирования смещения максимальны, виброскорость равна нулю и вся энергия, запасенная системой, равна потенциальной:
£(}= $^с?(.х)ск = Gx/2 = scos2(ot; г = Gxm/2.
По формуле (11.38) находят коэффициент потерь и преобразуют его с учетом выражения для критического импеданса:
(о$ 1 S со ~G
Г| = -
Тогда выражение (11.50) можно записать в виде
. G ( л со
(11.51)
Виброизоляция. Между источником вибрации и ее приемником, являющимся одновременно объектом защиты, устанавливают упру- годемпфирующее устройство — виброизолятор — с малым коэффициентом передачи (рис. 11.38, а). Схематично система «источник вибраций — защитное устройство — приемник» показана на рис. 11.38, б. При возбуждении системы защитное устройство, расположенное между источником и приемником, воздействует на них с реакциями Fr и Fr. Ниже будут рассматриваться только безынерционные устройства, у которых реакции FR и Fr равны. 390
Рис.
11.38. Виброизоляция:
а
— устройство виброизоляции (1 — источник;
2 — виброизолятор;
3 - б — схема системы И —
зу — П
приемник);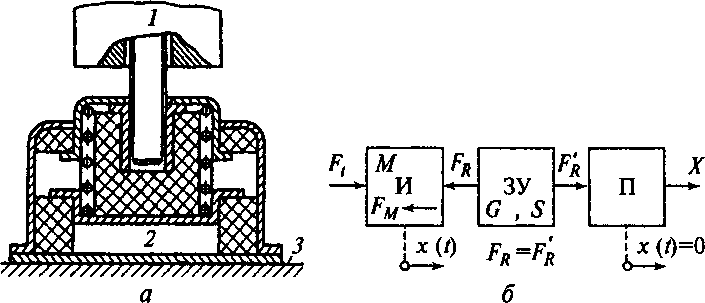
Различают два вида возбуждения: силовое и кинематическое; при этом соответственно большую массу имеет приемник и его считают неподвижным или источник и закон его движения считают заданным.
При силовом гармоническом возбуждении силой Ft = Fm цель защиты обычно состоит в уменьшении амплитуды силы FR, передаваемой на приемник. Импеданс виброизолятора определяется формулой (11.51). Импеданс вибросистемы
Z — ZM +ZR
G
(О
Л+J
Г 2 СО
ч°>0
-1
Поток энергии на входе в ЗУ определяется усредненной за цикл мощностью вынуждающей силы [3]:
Поток энергии на выходе из защитного устройства определяется усредненной за цикл мощностью реакции защитного устройства [3]:
Отношение мощностей W^/JV" называют силовым коэффициентом защиты kF = z/zr- Из соотношений Ft =zv и FR =zRv видно, что он при определенных условиях равен отношению амплитуды вынуждающей силы к амплитуде силы, переданной на приемник.
При кинематическом возбуждении цель защиты обычно заключается в уменьшении передаваемого смещения. Степень реализации
этой цели характеризуют динамическим коэффициентом защиты кх, равным отношению амплитуды смещения источника к амплитуде смещения приемника. Можно показать, что кх = z/Zr.
В общем случае энергетический коэффициент защиты можно выразить в виде kw = kFkx.
По формуле (11.39) эффективность виброизоляции
e = mgkw -201g
z
(11.52)
Zr
В области высоких частот импеданс z ® ZM (см. выше) и эффективность виброизоляции равна е « 401gw/wo — 101g(l + л2).В частности, если демпфирующее сопротивление мало влияет на движение системы, то величиной г| можно пренебречь. Тогда е = 401go)/o)o, т. е. в области высоких частот почти вся энергия затрачивается на движение массы; поток энергии, передаваемой на приемник, обратно пропорционален квадрату частоты возбуждения, и эффективность виброизоляции тем выше, чем больше частота со.
В области низких частот z « ZG и эффективность виброизоляции 101g(l + г|2), т. е. отрицательна или равна нулю.
В общем случае из выражения (11.52) следует, что эффективность виброизоляции
е = lOlgh2 + (ш2/о2о - I)2] - 101g(l + л2)-
Если потери в защитном устройстве отсутствуют (г| = 0), то эффективность
е = 201g(a>2/a>o — 1).
Из последнего выражения видно, что цель виброизоляции (е > 1) обеспечивается в частотном диапазоне: со > л/2со0 .
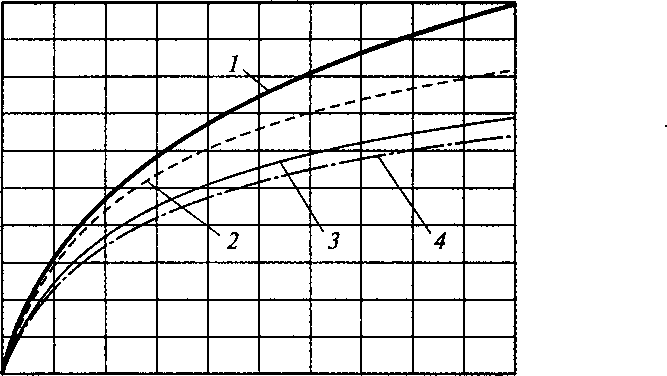
На рис. 11.39 представлены коэффициент виброизоляции т и эффективность виброизоляции е в зависимости от отношения частоты вынуждающей силы к собственной частоте вибросистемы при разных значениях отношения импеданса демпфирующего элемента к его критическому значению.
т
//
\\
*
1
//
//
VI
\\
-2
\
Л - vA
-3
"V
\
О
0,5 1 1,5 2 2,5 3
©/©о
1,41 2,27 3,13 3,99 4,85 5,71 6,56 7,42 8,28 9,14 10
<о/со0
б
Рис. 11.39. Коэффициент виброизоляции т= 1 /kF (а) и эффективность виброизоляции е (б) в зависимости от отношения частот и при значениях отношения S/SKp\ кривая 7 — 0; кривая 2—0,4; кривая J — 0,8; кривая 4—1
стью рабочей среды и т. д.). Зависимость между статическим прогибом и собственной частотой для некоторых материалов показана на рис. 11.40.