

3.3.2. Позиционные электрические регуляторы
Позиционными электрическими регуляторами называются устройства, в которых регулирование производится с помощью выходных ключей (электрических контактов, электронных, оптронных и др.), срабатывающих при достижении соответствующей границы зоны допустимого значения регулируемого параметра [12].
Двухпозиционные регуляторы (ДПЗР) формируют на своем выходе управляющие команды двух уровней: «больше-меньше», «включено-выключено». Структурная схема ДПЗР (рис. 3.53) содержит элемент сравнения 1, на входы которого поступают сигналы X и Xзад соответственно с датчика регулируемого параметра и задатчика 2. В результате этого на выходе элемента сравнения 1 формируется сигнал разности X1= Х – Хзад, который после усиления в усилителе 3 в виде сигнала X2 = kХ1 подается на вход релейного элемента 4, имеющего характеристику (рис. 3.54) с зоной нечувствительности Δ, коэффициентом возврата γ (0 < γ < 1) и зоной неоднозначности
X2вкл – Х2выкл= Δ – γΔ.
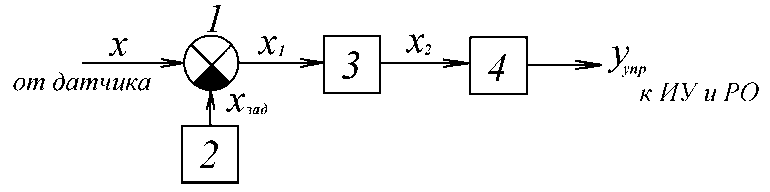
Рис. 3.53. Структурная схема двухпозиционного регулятора
При увеличении значения X2, т. е. разности истинного и заданного значений регулируемого параметра, усиленного в k раз до величины X2вкл, происходит включение релейного элемента 4 и на его выходе появляется выходной управляющий сигнал Yупр, воздействующий на исполнительное устройство ИУ и регулирующий орган РО (на рис. 3.53 не указаны). В результате этого значение X2 уменьшается и при достижении величины X2 < Х2выкл релейный элемент 4 выключается и управляющее воздействие прекращается, т. е. Yупр= 0.
ДПЗР настраиваются таким образом, чтобы значение Yупр и X2 отсчитывались в приращениях от условного равновесного состояния объекта регулирования, соответствующего расчетным значениям Yупр0 и X20, принятым за начало отсчета. Применительно к ДПЗР границы зоны неоднозначности на статической характеристике (рис. 3.53) принято обозначать –а и +а, при этом зона неоднозначности будет равна 2а.
|
|
Рис. 3.54. Статическая характеристика ДПЗР с зоной неоднозначности |
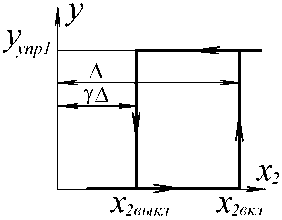
Рис. 3.55. Реальная статическая характеристика ДПЗР |
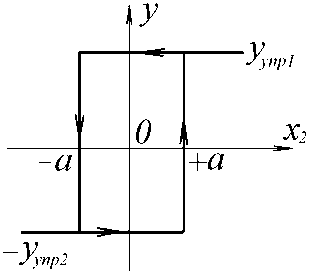
Аналитическая статическая характеристика ДПЗР в этом случае записывается в виде:
Yупр = Yупр1, при Х2 ≥ а; – а < Х2 < а и dХ2/dt < 0;
Yупр = – Yупр2, при Х2 ≤ – а; – а < Х2 < а и dХ2/dt> 0.
Отсюда следует, что ДПЗР постоянно оказывают на объект регулирования воздействия, отличные от их значения, которые были бы необходимы для равновесного состояния системы при Х2 = 0, т.е. автоматическая система будет работать в автоколебательном режиме в окрестностях ее равновесного состояния. С учетом статической характеристики ДПЗР реализуют П-закон регулирования. При использовании в качестве исполнительного устройства ИУ электродвигательного многооборотного реверсивного привода постоянной скорости с передаточной функцией
W(p) = 1/(TИУp + 1)
можно реализовать ПИ-закон регулирования.
Трехпозиционные регуляторы (ТПЗР) имеют статическую характеристику релейного элемента 4, представленную на рис. 3.56. Зона нечувствительности Δнч определяется в этом случае значением 2а2, а зона неоднозначности Δно – значением а2 – а1. Тогда аналитическая статическая характеристика записывается в виде:
Yупр= Yупр1, при Х2 Δнч/2; Δнч/2 – Δно< Х2< Δнч/2 и dХ2/dt < 0;
Yупр= – Yупр2, при Х2 – Δнч/2; Δно – Δнч/2> Х2> Δнч/2 и dХ2/dt > 0;
Из этого следует, что ТПЗР имеют устойчивое состояние (Yупр= 0) в окрестности равновесного состояния системы. В этом состоит принципиальное отличие ТПЗР от ДПЗР. Если при очередном переключении регулятора в состояние Yупр= 0 отклонение регулируемой величины Х2 не будет выходить за зону нечувствительности регулятора, т.е. будет сохраняться условие Х2 < Δнч/2, то в этом состоянии автоматическая система регулирования может оставаться бесконечно долго и в системе не будет автоколебательных процессов.
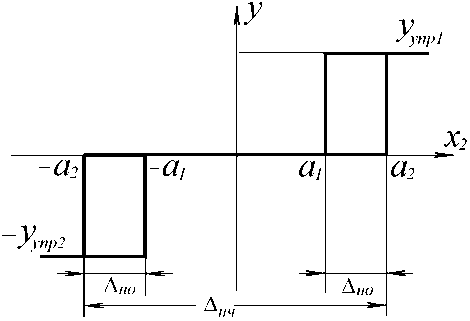
Рис. 3.56. Статическая характеристика ТПЗР
На рис. 3.57 представлены переходные процессы соответственно регулирующего воздействия и изменения регулируемой величины в системе с ДПЗР и объектом в виде инерционного звена. Переходный процесс для объекта с передаточной функцией без запаздывания изображен на рис. 3.57, б сплошной линией.
При включении ДПЗР в объект будет поступать такое количество энергии или вещества, которое обеспечит возрастание регулируемой величины по экспоненциальному закону до установившегося значения Хуст (кривая I). В точке 1 по истечении времени t1 количество поступившей энергии или вещества в объект обеспечит заданное значение Хзад регулируемой величины, но переключение регулятора не произойдет, т. к. Хзад находится в зоне неоднозначности. Когда регулируемая величина превысит значение Хзад + а по истечении времени t2 регулятор в точке 2 переключится и приток энергии или вещества прекратится. Однако из-за инерционности объекта через время t3 регулируемая величина достигнет значения Х' (точка 3) а далее начнет уменьшаться. Включение ДПЗР произойдет в момент времени t4 (точка 4), когда регулируемая величина будет меньше значения Хзад – а зоны неоднозначности. Однако из-за инерционности объекта ко времени t5 регулируемая величина достигнет значения Х”, а далее начнет увеличиваться.

Рис. 3.57. Переходные процессы в системе с ДПЗР
Если объект обладает запаздыванием, т. е. передаточная функция имеет вид
W0(p) = k0·e -pτ/(T0p+1),
то все указанные выше процессы будут протекать аналогичным образом, только с запаздыванием τ (кривая II).
Уменьшение диапазона колебаний регулируемой величины при двух- и трехпозиционном регулировании возможно за счет уменьшения коммутируемого регулятором количества энергии или вещества. В результате использования, так называемого метода неполного притока или оттока, снижается скорость изменения регулируемой величины при переключении регулятора. Это может быть достигнуто прерыванием регулирующего воздействия с определенной частотой и длительностью или применением обводных линий, обеспечивающих только часть притока оттока энергии или вещества.
Дальнейшее улучшение качества регулирования с использованием позиционных регуляторов и исполнительных устройств постоянной скорости заключается в изменении скважности управляющего сигнала Yупр в зависимости от амплитуды и полярности отклонения истинного X от заданного Xзад значения регулируемой величины.
Структурная схема такого регулятора, представленная на рис. 3.58, содержит усилитель 1, на вход которого поступает сигнал ±X2 = Х – Xзад; трехпозиционное реле 2; усилитель 3, вход которого связан с выходом формирователя 4 сигнала обратной связи, подключенного к выходу схемы 5 переключения знака сигнала обратной связи; выходные ключи 6, входы которых подсоединены к соответствующим выходам трехпозиционного реле 2, а выходы – к исполнительному устройству ИУ и схеме 5 переключения знака.
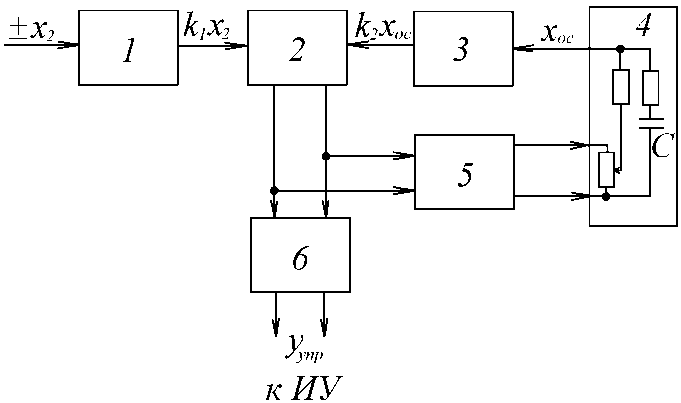
Рис. 3.58. Структурная схема позиционного регулятора с изменяюмой скважностью
При наличии отклонения регулируемой величины от заданной на первый вход трехпозиционного реле 2 поступает усиленный в k раз усилителем 1 сигнал ±X2, в результате чего трехпозиционное реле 2 срабатывает в одну из позиций относительно нейтрального положения в зависимости от знака X2. Через выходные ключи 6 сигнал Yупр поступает на исполнительное устройство ИУ, которое обеспечивает увеличение или уменьшение притока (или оттока) энергии или вещества в объект регулирования. Одновременно с выходных ключей 6 через схему 5 переключения знака напряжение подается на формирователь 4 сигнала обратной связи и далее через усилитель 3 – на второй вход трехпозиционного реле 2. Формирователь 4 обратной связи выполнен на RC элементах, которые обеспечивают инерционность зарядно-разрядных процессов и временную зависимость коэффициента передачи звена обратной связи, т. е.
β(t) ≠ const.
На рис. 3.59 приведены графики изменения отклонения величины Х2 и сигнала обратной связи Хос, а также сигнала управления Yупр и положения μ исполнительного устройства (ИУ).
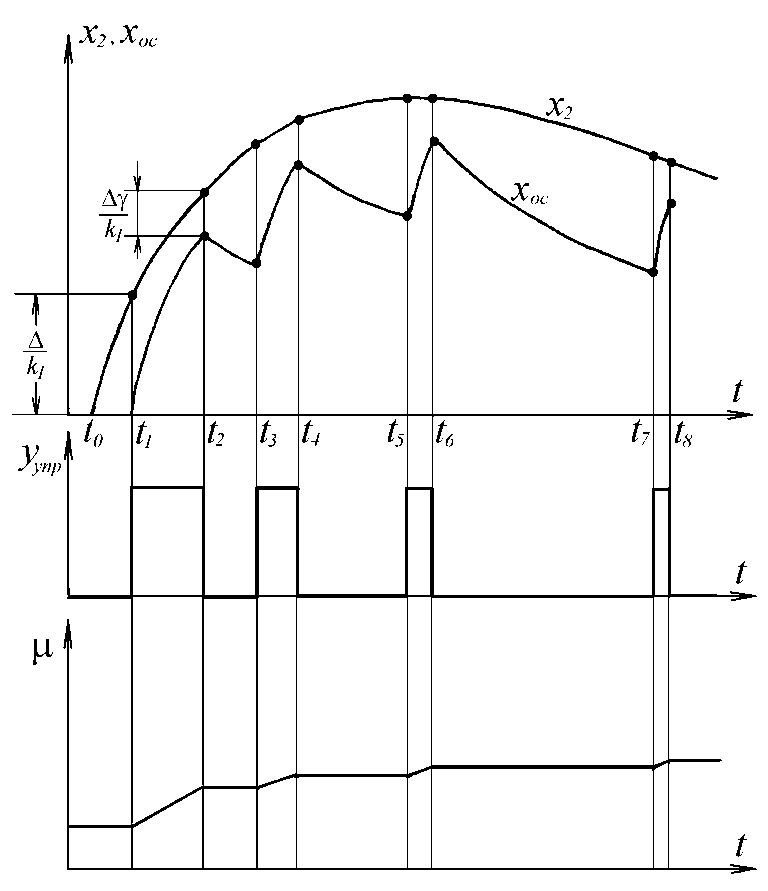
Рис. 3.59. Графики изменения отклонения величин Х2 , Хос , Yупр , μ ИУ
Если в системе автоматического регулирования по каким-либо причинам в момент времени t0 возникает отклонение регулируемой величины от заданного значения, то на первом входе трехпозиционного реле 2 имеет место возрастающий сигнал k1Х2. При достижении в момент времени t1 величины отклонения более Δ/k1, где Δ – зона нечувствительности релейного элемента, включается трехпозиционное реле 2, через выходные ключи 6 – исполнительное устройство ИУ, а через схему переключения знака 5 – формирователь 4 сигнала обратной связи. Начинается заряд конденсатора С и увеличивается напряжение Хос на втором входе трехпозиционного реле 2. Так как dХос/dt > dХ2/dt, то разность k1Х2 – k2Хос на входах трехпозиционного реле 2 уменьшается и в момент времени t2, когда (k1Х2 – k2Хос) < Δγ/k1, где γ – коэффициент возврата, трехпозиционное реле 2 и исполнительное устройство ИУ – отключаются, а конденсатор С начинает разряжаться. За время t3 – t2 разряда конденсатора С исполнительное устройство ИУ находится в выключенном состоянии. В момент времени t3, когда разность k1Х2 – k2Хос станет больше Δγ/k1, трехпозиционное реле 2 снова включится и описанные выше процессы будут повторяться. Однако, как это видно из рис. 3.59, длительность включения исполнительного устройства ИУ со временем уменьшается, а паузы между включениями – увеличиваются.