

Назовите основные показатели качества сар и покажите их на графике переходного процесса.
Способность САР выполнять возложенные на нее задачи количественно определяется т.н. показателями качества – численными параметрами, характеризующими ее точность и быстродействие. Показатели качества разделяются на
- показатели качества переходного,
- показатели качества установившегося режимов,которые, в свою очередь, разделяются на прямые и косвенные показатели качества.
В установившемся режиме работы САР должным образом решает возлагаемые на нее задачи: она следит за заданием, заставляя управляемую величину быть с некоторой точностью пропорциональной величине задания, и подавляет влияние возмущений на управляемую величину. Для удобства анализа установившийся режим работы САР подразделяют на подрежимы:
- статический (статику), когда воздействия на САР и ее реакции постоянны,
- динамический (динамику), когда воздействия меняются, но меняются плавно и медленно, т.е. являются гладкими, без скачков функциями времени, чтобы не проявлялись сколько-нибудь заметно собственные инерционно-колебательные свойства САР, вызывающие переходный режим.
О динамических свойствах САР в установившемся режиме судят по ее реакции на пробные воздействия, изменяющиеся во времени по:
- степенному закону;
- по гармоническому (синусоидальному) закону.
Прямые показатели качества установившегося режима это:
- коэффициент ошибки по положению с0;
- коэффициент ошибки по скорости с1;
- коэффициент ошибки по ускорению с2, определяемые отдельно по заданию и по возмущению,
частотные характеристики замкнутой САР: по каналу управления и каналу задание (возмущение) – ошибка.
Косвенный показатель качества установившегося режима это порядок астатизма САР.
Если
текущее значение регулируемого параметра
равно заданному, то считается, что
система находится в состоянии равновесия.
Если под действием какого – либо
возмущения в системе возникло отклонение
регулируемого параметра, то ей необходимо
время, чтобы снова прийти в состояние
равновесия. В течение этого времени
система находится в переходном режиме.
Поведение
системы в переходном режиме изображается
в виде графика переходного процесса –
зависимости изменения во времени
выходной величины (регулируемого
параметра) системы.
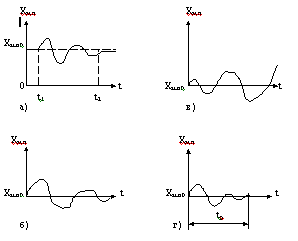 Рис.2.3.
Графики
переходных процессов в САР. Текущее
значение регулируемого параметра на
графике обозначено через Хвых
(рис.а) и его изменение показано сплошной
линией. Т.к. мы рассматриваем систему
стабилизации, то заданное значение
Хвых0
остаётся постоянным (пунктирная линия).
Совпадение кривых текущего и заданного
значений на отрезке времени 0 – t1
свидетельствует о том, что в этот период
система находилась в состоянии равновесия.
В момент времени t1
под действием возмущения система
отклоняется от состояния равновесия и
вновь к возвращается под действием
регулятора к моменту времени t2.
В период времени t1
– t2
система находится в переходном режиме,
а после t2
– снова в состоянии равновесия. При
исследовании систем принято их
рассматривать начиная от момента
появления отклонения регулируемого
параметра. В этом случае начало координат
соответствует заданному значению
регулируемого параметра.
Рис.2.3.
Графики
переходных процессов в САР. Текущее
значение регулируемого параметра на
графике обозначено через Хвых
(рис.а) и его изменение показано сплошной
линией. Т.к. мы рассматриваем систему
стабилизации, то заданное значение
Хвых0
остаётся постоянным (пунктирная линия).
Совпадение кривых текущего и заданного
значений на отрезке времени 0 – t1
свидетельствует о том, что в этот период
система находилась в состоянии равновесия.
В момент времени t1
под действием возмущения система
отклоняется от состояния равновесия и
вновь к возвращается под действием
регулятора к моменту времени t2.
В период времени t1
– t2
система находится в переходном режиме,
а после t2
– снова в состоянии равновесия. При
исследовании систем принято их
рассматривать начиная от момента
появления отклонения регулируемого
параметра. В этом случае начало координат
соответствует заданному значению
регулируемого параметра.
Переходный процесс может иметь разный характер. Сравнивая графики (б) и (в), можно увидеть, что в одном случае система возвращается к состоянию равновесия, а в другом – нет. Считают, что в первом случае система устойчива, а во втором – неустойчива. Так как назначение САР – поддержание регулируемого параметра на заданном значении, то система должна быть устойчивой.