

К какому типовому звену относится термопара. Ее переходная характеристика.
Переходная характеристика может быть получена с помощью формулы Хевисайда:
 ,
,
где p1 = - 1/T - корень уравнения D(p) = Tp + 1 = 0; D’(p1) = T.

Переходная характеристика имеет вид экспоненты (рис.45), по которой можно определить передаточный коэффициент k, равный установившемуся значению h(t), и постоянную времени Т по времени t, соответствующему точке пересечения касательной к кривой в начале координат с ее асимптотой. При достаточно больших Т звено на начальном участке может рассматриваться как интегрирующее, при малых Т звено приближенно можно рассматривать как безынерционное. Примеры апериодического звена: термопара
К какому типовому звену относится маятник. Его переходная характеристика.
Переходная функция колебательного звена описывается формулой:
Колебательный характер переходной функции определяется наличием в ней периодических функций синуса и косинуса. Колебания будут затухать с течением времени, т.к. множитель при этих функциях уменьшается с увеличением времени и стремится к нулю при (t→∞).
В автоматических системах различают свободные и вынужденные колебания. Вынужденные колебания выходной величины звена возникают из-за колебаний воздействия (например, при синусоидальном воздействии). Колебания переходной функции колебательного звена – это свободные колебания: воздействие на звено не периодическое, а колебания возникают из-за собственных колебательных свойств звена.
Можно сделать следующие выводы о виде переходной функции:
1) Установившееся значение переходной функции равно К:
.
2) Модуль мнимой части полюсов передаточной функции Ω представляет собой угловую частоту колебаний. Период колебаний равен 2π/ω.
3) Модуль действительной части полюсов передаточной функции α определяет скорость затухания колебаний. Чем больше α, тем быстрее затухают колебания. При одной и той же постоянной времени Т колебания будут затухать тем быстрее, чем больше значение коэффициента демпфирования μ.
Примеры колебательных звеньев: последовательный RLC контур, маятник и пружинный осциллятор
Изобразите переходную характеристику неустойчивой системы.
Что такое обратная связь в сар
На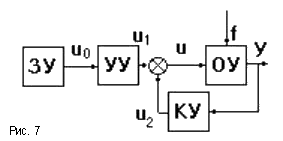 ибольшее
распространение в технике получил
принцип
обратной связи
(рис.7). Здесь управляющее воздействие
корректируется в зависимости от выходной
величины y(t).
И уже не важно, какие возмущения действуют
на ОУ. Если значение y(t)
отклоняется от требуемого, то происходит
корректировка сигнала u(t)
с целью уменьшения данного отклонения.
Связь выхода ОУ с его входом называется
главной
обратной связью (ОС).
В
ибольшее
распространение в технике получил
принцип
обратной связи
(рис.7). Здесь управляющее воздействие
корректируется в зависимости от выходной
величины y(t).
И уже не важно, какие возмущения действуют
на ОУ. Если значение y(t)
отклоняется от требуемого, то происходит
корректировка сигнала u(t)
с целью уменьшения данного отклонения.
Связь выхода ОУ с его входом называется
главной
обратной связью (ОС).
В
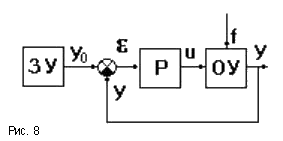 частном
случае (рис.8) ЗУ формирует требуемое
значение выходной величины yо(t),
которое сравнивается с действительным
значением на выходе САУ y(t).
Отклонение e
= yо-y
с выхода сравнивающего устройства
подается на вход регулятора
Р, объединяющего в себе УУ, УО, ЧЭ.Если
e
частном
случае (рис.8) ЗУ формирует требуемое
значение выходной величины yо(t),
которое сравнивается с действительным
значением на выходе САУ y(t).
Отклонение e
= yо-y
с выхода сравнивающего устройства
подается на вход регулятора
Р, объединяющего в себе УУ, УО, ЧЭ.Если
e![]() 0,
то регулятор формирует управляющее
воздействие u(t),
действующее до тех пор, пока не обеспечится
равенство e
= 0,
или y
= yо.
Так как на регулятор подается разность
сигналов, то такая обратная связь
называется отрицательной,
в отличие от положительной
обратной связи,
когда сигналы складываются.
Такое
управление в функции отклонения
называется регулированием,
а подобную САУ называют системой
автоматического регулирования
(САР). Так на рис.9 изображена упрощенная
схема САР хлебопекарной печи. Ро
0,
то регулятор формирует управляющее
воздействие u(t),
действующее до тех пор, пока не обеспечится
равенство e
= 0,
или y
= yо.
Так как на регулятор подается разность
сигналов, то такая обратная связь
называется отрицательной,
в отличие от положительной
обратной связи,
когда сигналы складываются.
Такое
управление в функции отклонения
называется регулированием,
а подобную САУ называют системой
автоматического регулирования
(САР). Так на рис.9 изображена упрощенная
схема САР хлебопекарной печи. Ро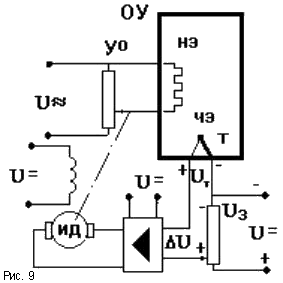 ль
ЗУ здесь выполняет потенциометр,
напряжение на котором ^
Uз
сравнивается с напряжением на термопаре
Uт.
Их разность
ль
ЗУ здесь выполняет потенциометр,
напряжение на котором ^
Uз
сравнивается с напряжением на термопаре
Uт.
Их разность
![]() U
через усилитель подается на исполнительный
двигатель ИД, регулирующий через редуктор
положение движка реостата в цепи НЭ.
Наличие усилителя говорит о том, что
данная САР является системой
непрямого регулирования,
так как энергия для функций управления
берется от посторонних источников
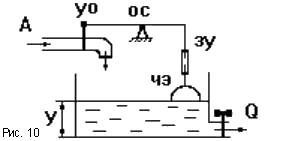
питания, в отличие от систем
прямого регулирования,
в которых энергия берется непосредственно
от ОУ, как, например, в САР уровня воды
в баке (рис.10).
U
через усилитель подается на исполнительный
двигатель ИД, регулирующий через редуктор
положение движка реостата в цепи НЭ.
Наличие усилителя говорит о том, что
данная САР является системой
непрямого регулирования,
так как энергия для функций управления
берется от посторонних источников
питания, в отличие от систем
прямого регулирования,
в которых энергия берется непосредственно
от ОУ, как, например, в САР уровня воды
в баке (рис.10).
 ^
Недостатком
принципа обратной
связи является инерционность системы.
Поэтому часто применяют комбинацию
данного принципа с принципом компенсации,
что позволяет объединить достоинства
обоих принципов: быстроту реакции на
возмущение принципа компенсации и
точность регулирования независимо от
природы возмущений принципа обратной
связи.
^
Недостатком
принципа обратной
связи является инерционность системы.
Поэтому часто применяют комбинацию
данного принципа с принципом компенсации,
что позволяет объединить достоинства
обоих принципов: быстроту реакции на
возмущение принципа компенсации и
точность регулирования независимо от
природы возмущений принципа обратной
связи.