

31. Математическое описание линейных непрерывных систем управления в динамическом режиме: временные характеристики
Различают следующие формы динамических характеристик:
- обыкновенное дифференциальное уравнение;
- временные характеристики;
- передаточная функция;
- частотные характеристики.
Временные характеристики. Дифференциальное уравнение не дает наглядного представления о динамических свойствах элемента, но такое представление дает функция y(t), т.е. решение этого уравнения. Однако одно и то же дифференциальное уравнение может иметь множество решений, зависящих от начальных условий и характера входного воздействия x(t), что неудобно при сопоставлении динамических свойств различных элементов. Поэтому было решено характеризовать эти свойства элемента только одним решением дифференциального уравнения, полученным при нулевых начальных условиях и одном из типовых воздействий: единичном ступенчатом, дельта-функции, гармоническом, линейном.
Под начальными условиями понимают значение выходной величины и всех ее производных в момент времени t = t0 при условии, что до этого времени внешние воздействия отсутствовали.
Начальные
условия называются нулевыми,
если выполняется условие:
 .
.
С
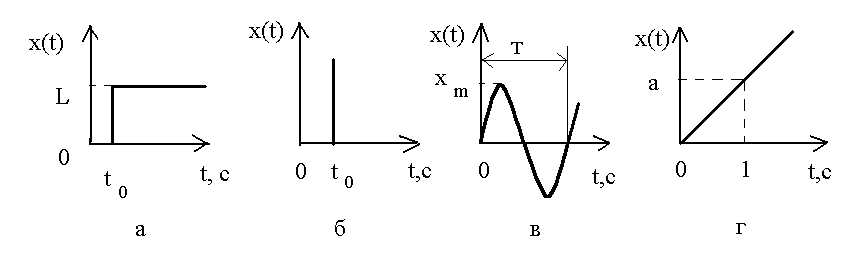
С Рисунок 3.2 – Типовые воздействия: а – ступенчатое; б – импульсное; в – гармоническое; г – линейное тупенчатому воздействию соответствует функция:
 0
при t<
0;
0
при t<
0;
x(t) =
L при t ³ 0.
При анализе и расчете систем удобно использовать ступенчатое воздействие, у которого величина L = 1. Его называют единичным ступенчатым воздействием и обозначают 1(t). Математическое выражение, описывающее единичное ступенчатое воздействие, имеет вид:
 0
при t<
0;
0
при t<
0;
1(t) =
1 при t ³ 0.
Ступенчатое воздействие чаще всего используют при исследованиях систем стабилизации параметров, так как эти воздействия наиболее близки к реальным входным (задающим и возмущающим) воздействиям систем стабилизации. Реакция звена на единичную ступенчатую функцию при нулевых начальных условиях называется переходной функцией, которую принято обозначать h(t). Графическое изображение переходной функции называют переходной характеристикой.
Импульсное воздействие – одиночный импульс прямоугольной формы (рисунок 3.2б), имеющий достаточно большую высоту и малую длительность (по сравнению с инерционностью испытываемой системы) с площадью а0. При математическом анализе САУ используют единичное импульсное воздействие описываемое дельта-функцией Дирака:
 0
при t<
0;
0
при t<
0;
d (t) =
¥
при t>
0,
причем

Последние
два выражения позволяют рассматривать
дельта-функцию, как импульс, имеющий
бесконечно большую высоту, бесконечно
малую длительность и единичную площадь.
Дельта-функцию можно определить также
как производную единичного ступенчатого
воздействия:
 Нормальная реакция звена на импульсную
функцию называется импульсной
переходной функцией
или
весовой
функцией (функцией
веса),
которую принято обозначать v(t).
Графическое изображение переходной
функции называют импульсной
переходной характеристикой.
Нормальная реакция звена на импульсную
функцию называется импульсной
переходной функцией
или
весовой
функцией (функцией
веса),
которую принято обозначать v(t).
Графическое изображение переходной
функции называют импульсной
переходной характеристикой.
Гармоническое воздействие – сигнал синусоидальной формы, описываемый функцией (рисунок 3.2в): x(t) = xm sinw t , (-¥ < t < ¥ ), (3.9)
где xm – амплитуда сигнала; w = 2p / Т – круговая частота; Т – период сигнала. Гармонический сигнал, начинающий действовать в момент времени t = 0, описывают при помощи единичной ступенчатой функции:
x(t) = 1(t) xm sinw t , (0 £ t < ¥ ). (3.10)
Линейное воздействие – воздействие, описываемое функцией:
x(t) = 1(t) а1 t , (0 £ t < ¥ ), (рисунок 3.2г). Коэффициент а1 характеризует скорость нарастания воздействия x(t).