

18 Функциональная структура (схема) – структура (схема), отражающая функции (целевые назначения) отдельных частей асу.
Такими функциями могут быть:
получение информации о состоянии объекта управления;
преобразование сигналов;
сравнение сигналов и т.п.
Р исунок 1.1 - Обобщенная структурная схема асу
В качестве частей функциональной структуры (схемы) АСУ рассматриваются функциональные устройства. Названия устройств указывают на выполнение определенной функции. Например:
датчик;
усилитель;
блок сравнения;
управляющий блок;
исполнительное устройство и т.п.
Н а
рисунке 1.2 приведен пример функциональной
схемы АСУ, где изображены следующие
функциональные устройства:
а
рисунке 1.2 приведен пример функциональной
схемы АСУ, где изображены следующие
функциональные устройства:
Д – датчик – предназначен для получения сигнала, пропорционального определенному воздействию;
ЭС – элемент сравнения – служит для получения сигнала, пропорционального отклонению управляемой величины x(t) от задающего воздействия xз(t);
КУ – корректирующее устройство – предназначено для улучшения качества управления;
УПБ – усилительно-преобразующий блок – служит для усиления сигнала и придания ему определенной формы;
РО – регулирующий орган – служит для непосредственного воздействия на регулируемую среду (примеры РО: вентиль, задвижка, тиристор и т.п.);
ИУ – исполнительное устройство – предназначено для приведения в действие регулирующего органа (примеры ИУ: электродвигатель, электромагнит и т.п.).
Функциональная схема автоматизации. Является основным проектным документом, который определяет структуру и уровень автоматизации технологического процесса на данном объекте. На функциональной схеме, при помощи условных графических обозначений, указывают на техническое оборудование, типы коммуникации, органы управления, оборудования и средства автоматизации. Функциональная схема автоматизации подразделяется графически на две зоны. В верхней части чертежа изображена технологическая схема. А в нижней части наносят условные графические обозначения, которые схематически изображают установку местных приборов, щитов, пультов, пунктов контроля и управления руководящих машин и аппаратов.
19 Самый распространенный тип электрических схем - схемы электрические принципиальные. Они дают четкое понимание о работе установки, так как на таких схемах показывают все электрические цепи. На схемах электрических принципиальных условными обозначениями изображаются все электрические элементы, аппараты и устройства с учетом реальной последовательности их работы.
Используя электрические принципиальные схемы разрабатывают схемы соединений и подключения. По другому такие схемы в народе называют монтажные. Такие схемы показывают реальное расположение электродвигателей, электрических аппаратов и других элементов автоматизации на станке, в шкафах и на пультах управления. Все элементы на монтажных схемах выполняются аналогично по тем же ГОСТ, как и на схемах принципиальных.
Все провода на схеме соединения и подключения имеют имеют свой уникальный номер, который после монтажа реальной схемы наносится на провод. На таких схемах провода идущие в одном направлении часто объединяют в жгуты или пучки и показывают одной толстой линией. Все соединения проводов выполняются только на зажимах электрических аппаратов или с помощью специальных клеммников. Все соединения между частями отдельных шкафов и пультов управления выполняются тоже через клеммник, что значительно в дальнейшем облегчает обслуживания электрооборудования станков.
Если на принципиальных схемах отдельные элементы одного и того же аппарата могут находится в разных частях схемы, например, катушка пускателя - в цепях управления, а контакты в силовых цепях, то на схеме соединений и подключения все элементы того же пускателя показываются рядом. При этом выводы аппарата на схеме нумеруются таким же образом, как на реальном аппарате.
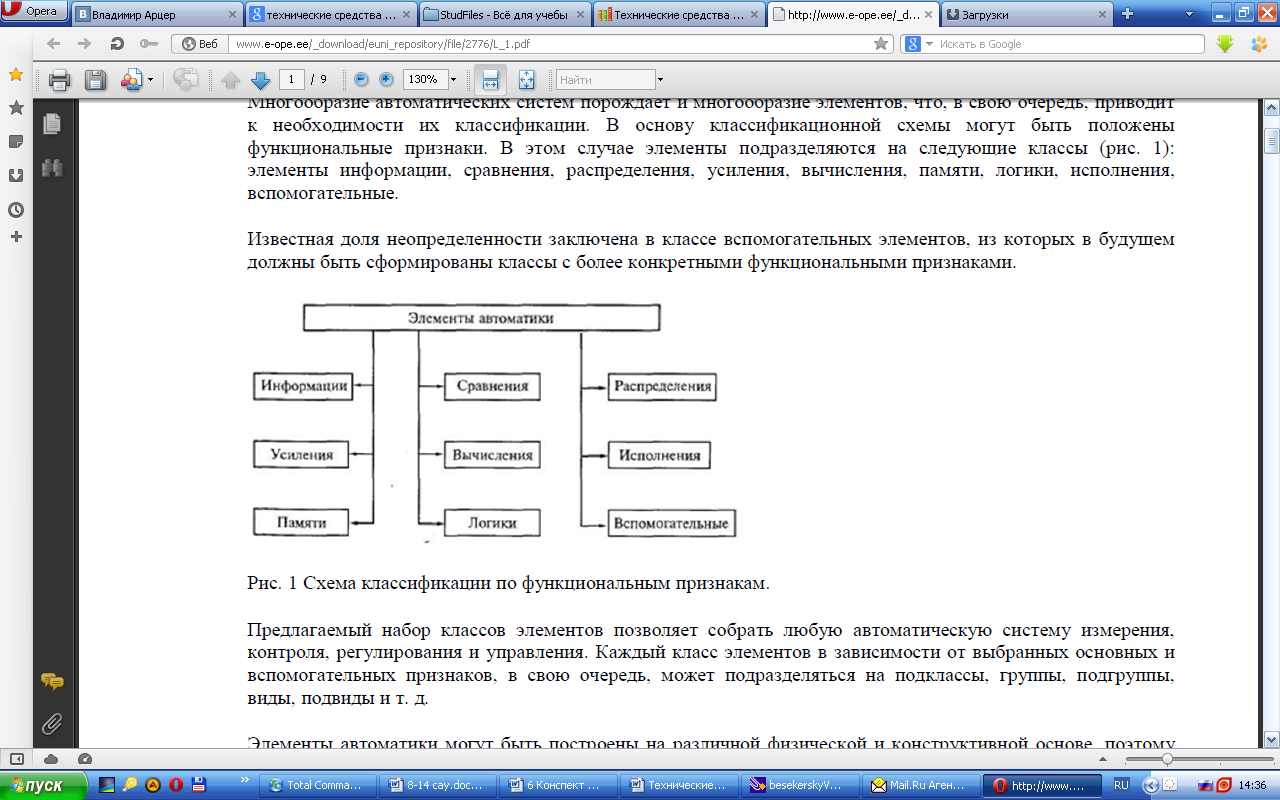
20 Любая самая сложная автоматическая система состоит из определенного комплекса элементов.
Многообразие автоматических систем порождает и многообразие элементов, что, в свою очередь, приводит
к необходимости их классификации. В основу классификационной схемы могут быть положены
функциональные признаки. В этом случае элементы подразделяются на следующие классы (рис. 1):
элементы информации, сравнения, распределения, усиления, вычисления, памяти, логики, исполнения,
вспомогательные.
Известная доля неопределенности заключена в классе вспомогательных элементов, из которых в будущем
должны быть сформированы классы с более конкретными функциональными признаками.
Предлагаемый набор классов элементов позволяет собрать любую автоматическую систему измерения,
контроля, регулирования и управления. Каждый класс элементов в зависимости от выбранных основных и
вспомогательных признаков, в свою очередь, может подразделяться на подклассы, группы, подгруппы,
виды, подвиды и т. д.
Элементы автоматики могут быть построены на различной физической и конструктивной основе, поэтому
основными их признаками являются функциональная зависимость и принципы формирования. Для
дальнейшего подразделения могут быть приняты такие признаки, как состояние вещества, из которого
строится элемент (твердое, жидкое, газообразное), и характер измеряемой величины (или состояния), т.е.
механическая, акустическая, тепловая, электрическая, магнитная, химическая и др.
Классификация элементов автоматики
Элементы автоматики чрезвычайно разнообразны по выполняемым функциям, конструкции, принципу
действия, характеристикам, физической природе преобразуемых сигналов и т.д.
1) В зависимости от того, как элементы получают энергию, необходимую для преобразования входных
сигналов, они делятся на пассивные и активные.
Пассивные элементы автоматики – это элементы, у которых входное воздействие (сигнал хвх) преобразуется
в выходное воздействие (сигнал хвых) за счёт энергии входного сигнала (например, редуктор).
Активные элементы автоматики для преобразования входного сигнала используют энергию от
вспомогательного источника (например, двигатель, усилитель).
2) В зависимости от энергии на входе и выходе элементы автоматики подразделяются на:
- электрические;
- гидравлические;
- пневматические;
- механические;
- комбинированные.
3) По выполняемым функциям в системах регулирования и управления элементы автоматики
подразделяются на:
- датчики;
- усилители;
- исполнительные устройства;
- переключающие устройства;
- вычислительные элементы;
- согласующие элементы;
- вспомогательные элементы и т.д.
21 Датчиком называется элемент, который устанавливается в технологическое оборудование (в ТП) и который первым воспринимает поступающую на их вход информацию об управляемой величине объекта
управления. Он преобразует измеряемые величины в сигналы, удобные для дальнейшего использования в устройстве автоматического управления.
Большинство датчиков преобразует входной неэлектрический сигнал хвх в выходной электрический сигнал хвых. В зависимости от вида входного неэлектрического сигнала хвх бывают датчики механических величин (датчики перемещения, датчики скорости, датчики ускорения), датчики тепловых величин (датчики температуры), датчики оптических величин (датчики излучения) и т.д.
Часто применяются датчики с двойным преобразованием сигнала, например, входной неэлектрический
сигнал хвх сначала преобразуется в перемещение, а затем перемещение преобразуется в выходной
электрический сигнал хвых.
Воспринимающие элементы по характеру работы делятся на датчики и чувствительные механизмы. Датчиком называется такой чувствительный элемент, который воспринимает изменения величины какого-либо параметра и преобразует эти изменения в электрический сигнал. Чувствительные механизмы — такие устройства, которые при соответствующем изменении параметра не только вырабатывают сигнал того или иного вида, но и непосредственно выполняют необходимое включение, выключение или переключение исполнительных органов.
22Сравнивающие устройства или элементы сравнения являются неотъемлемой частью любой системы автоматического управления. К одному из входов сравнивающего устройства, как правило, подключается датчик, к другому - задающее устройство (задатчик).
В качестве задающих устройств в электрических схемах сравнения обычно используют переменные резисторы, а в отдельных случаях - многоцепные переключатели с набором резисторов, а потенциометры с профильными каркасами, кулачковые механизмы и другие устройства. С развитием вычислительной техники в качестве задающего устройства стали использоваться специальные программы.
В сравнивающих устройствах управляемая величина у, контролируемая датчиком, сравнивается с сигналом задания g, формируемым задатчиком. На выходе сравнивающего устройства устанавливается исполнительный механизм (ИМ), который в зависимости от сигнала рассогласования, определяемого выражением
? = g- y,
может находиться в состоянии равновесия (при ? = 0) или рабочем состоянии (при ? ? 0). Пусковое устройство включает ИМ в целях устранения рассогласования.
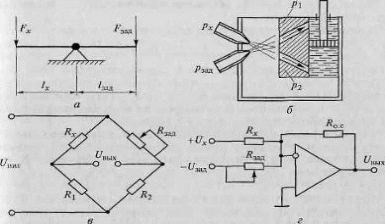
В кинематических схемах сравнение механических величин может осуществляться с помощью рычага, равновесие которого определяется соотношением
xlx=Fзадlзад,
Мостовая схема сравнения постоянного тока (рис. 22, в) состоит из задающего резистора Rзад, датчика Rx, сопротивление которого зависит от изменения управляемой величины, и двух образцовых резисторов с сопротивлениями R1, и R2. На одну из диагоналей схемы подают напряжение питания Uпит, с другой ее диагонали снимают выходное напряжение Uвых, которое питает ИМ (например, поляризованное реле).
23 Задающие устройства
Задающие устройства предназначены для задания значения регулируемого (управляемого) параметра. По виду вырабатываемых сигналов задающие устройства делятся на 2 класса: цифровые и аналоговые.
Задатчик формирует сигнал w, который сравнивается с сигналом х от датчика, т. е. вид сигнала определяется примененным в регуляторе датчиком. Чаще всего задатчик действует по принципу компенсации сил (перемещений) или электрических величин (реже — пневматических и гидравлических).
Механические задатчики имеют, как правило, настроечную пружину с натяжным механизмом.
Электрические задатчики представляют собой резисторы с переменным сопротивлением, переменные индуктивности и переключатели. Пример задающего устройства такого типа — резистор RP для настройки на желаемую температуру — показан в схеме терморегулятора (рис. 8.9). Формирование рассогласования в электрических схемах производится с использованием дифференциальных и мостовых методов включения.
Для программных и следящих регуляторов одним из важнейших признаков задатчика является вид носителя -программы или заданной функциональной зависимости — непрерывной или дискретной. Для наиболее часто применяемых в системах ТГВ регуляторов в задающих устройствах непрерывного действия используются кулачковые, лекальные и рычажные механизмы и функциональные резисторы (потенциометры).
24 Однако обычно команды, выходящие из блока управления, не обладают достаточной мощностью для приведения в действие исполнительных органов. Поэтому в системах автоматических устройств часто используют усилители, предназначенные для усиления сигналов блока управления и передачи их исполнительным механизмам. Усилители бывают электрические, гидравлические и пневматические.
Отдельную группу элементов автоматических устройств составляют исполнительные механизмы, приводящие в действие рабочие органы станка.
Активный усилитель — усиление сигнала осуществляется за счёт энергии внешнего источника: в сервоприводах (как то: гидро-, электро-, пневмоусилители) усиливается исходное механическое движение (как правило, оператора), за счёт внешней энергии. В электрических усилителях увеличивается амплитуда исходного сигнала (по напряжению и силе тока), в фотоумножителях — усиливается интенсивность исходного светового потока. В активных усилителях часто используется обратная связь: положительная — для повышения чувствительности, и отрицательная — для улучшения точности/стабильности.
Пассивный усилитель — усиление одной (необходимой) характеристики сигнала осуществляется за счёт уменьшения других характеристик: например, домкрат (а также тисы, ручная таль, рычаг) является усилителем — движения (силы) руки — за счёт скорости (эта характеристика сигнала уменьшается). Мухобойка, теннисная ракетка — для сравнения — являются усилителями скорости (за счёт уменьшения силы и/или времени воздействия).
Операционный усилитель
Операционный усилитель — (ОУ, OpAmp) — усилитель постоянного тока с дифференциальным входом и, как правило, единственным выходом, имеющий высокий коэффициент усиления. ОУ почти всегда используются в схемах с глубокой отрицательной обратной связью, которая, благодаря высокому коэффициенту усиления ОУ, полностью определяет коэффициент передачи полученной схемы.
В настоящее время ОУ получили широкое применение как в виде отдельных чипов, так и в виде функциональных блоков в составе более сложных интегральных схем. Такая популярность обусловлена тем, что ОУ является универсальным блоком с характеристиками, близкими к идеальным, на основе которого можно построить множество различныхэлектронных узлов.
25 Исполнительные устройства относятся к элементам автоматики, создающим управляющие воздействия на
объект управления. Они изменяют состояние или положение регулирующего органа объекта таким образом,
чтобы регулируемый параметр соответствовал заданному значению. К исполнительным устройствам,
создающим управляющее воздействие в виде силы или вращающего момента, относятся силовые
электромагниты, электромагнитные муфты, двигатели.
Двигатели в зависимости от вида применяемой для работы энергии могут быть:
- электрическими;
- гидравлическими;
- пневматическими.
В качестве исполнительных устройств, изменяющих состояние регулирующего органа, могут
использоваться усилители или реле.
Исполнительные механизмы
Исполнительный блок в системах автоматического регулирования и управления выполняет непосредственно действия, осуществляющие заданный прием управления (пуск и остановку станка, переключение золотников, открытие вентилей и т. д.). По принципу действия исполнительные механизмы делятся на электрические, гидравлические и пневматические.
К электрическим устройствам относятся электродвигатели переменного и постоянного тока.
В системах программного управления широкое применение находят шаговые электродвигатели.
Электромагниты предназначены для выполнения быстрых перемещений рабочих органов на небольшие расстояния. Их применяют для управления гидравлическими и пневматическими вентилями, кранами, золотниками.
Электромагнитные фрикционные муфты являются устройствами для передачи крутящего момента.
26 Реле – это элементы автоматики, у которых изменение выходного сигнала (хвых) происходит дискретно
(т.е. скачкообразно) при достижении входным сигналом (хвх) определённого значения, вызывающего
срабатывание реле. Это значение входного сигнала называется уровнем срабатывания реле.
Мощность входного сигнала (хвх), вызывающего срабатывание реле, значительно меньше мощности,
которой реле может управлять. Поэтому реле используется и как усилительный, и как исполнительный
элемент.
Реле часто используются и как автоматически управляемые коммутаторы сигналов в многоканальных
системах сбора и передачи данных, в которых обрабатывается информация от десятков, сотен и даже тысяч
датчиков. Они применяются также в системах контроля, сигнализации, блокировки и защиты. реле — приборы, служащие для преобразования, размножения, а иногда и для усиления сигналов.
27 Технико-экономическая эффективность автоматизации проектирования оценивается для определения целесообразности автоматизации проектирования на данном предприятии, сравнения с лучшими отечественными и зарубежными системами автоматизации проектирования.
Эти оценки включают в себя эффект от создания и внедрения САПР не только в процессе пректирования в ПИИ и КС, но и в изготовлении на заводе и эксплуатации спроектированных с помощью САПР САУ и их устройств.
Эффективность САПР складывается из многих факторов и источников; важнейшие из них приведены ниже. Характерным для оценки технико-экономической эффективности является то обстоятельство, что эффект от применения САПР складывается не только из непосредственных оценок каждого инструмента, но и из оценок процессов производства и эксплуатации изделия. Это объясняется повышением качества проектов и возможностью прямого выхода па гибкие производственные системы (ГПС) и создание на этой основе изделий, исключающих брак и облегчающих их эксплуатацию.
Оптимальной называется наилучшая в некотором технико-экономическом смысле система. Основной ее особенностью является наличие двух целей управления, которые эти системы решают автоматически.
Основная цель управления - поддержание управляемой величины на заданном значении и устранение возникающих отклонений этой величины. Цель оптимизации - обеспечение наилучшего качества управления, определяемое по достижению экстремума некоторого технико-экономического показателя, называемого критерием оптимальности (КО).
28 логические элементы автоматики
- устройства, реализующие некоторые простые логические функции и функциональные преобразования в машинах, самостоятельно работающих по заданной программе. Наиболее распространенным логическим элементом, применяемым в схемах управления автоматических устройств, является электромеханическое реле, реагирующее на определенные значения и изменения величин к.-л. параметра. Напряжение на его катушке является входным сигналом, состояние контактов реле (замкнутость или разомкнутость) - выходным сигналом.
Логические элементы являются одной из важнейших частей электронно-вычислительных машин. Они подразделяются на элементы, реализующие логическое отрицание, - схема "НЕ"; элементы, реализующие логическую конъюнкцию, - схема "И"; элементы, реализующие логическую дизъюнкцию, - схема "ИЛИ", и элементы, реализующие комбинированные логические операции. В сущности смысл работы логических элементов заключается в том, чтобы пропускать или не пропускать сигнал по той или иной цели, усиливать поступивший сигнал или не усиливать и т. п. Набор логических элементов позволяет электронно-вычислительной машине осуществлять преобразования информации в соответствии с преобразованиями формул в алгебре логики.
Логические элементы — устройства, предназначенные для обработки информации в цифровой форме (последовательности сигналов высокого — «1» и низкого — «0» уровней вдвоичной логике, последовательность «0», «1» и «2» в троичной логике, последовательности «0», «1», «2», «3», «4», «5», «6», «7», «8» и «9» в десятичной логике). Физически логические элементы могут быть выполнены механическими, электромеханическими (на электромагнитных реле), электронными (на диодах и транзисторах), пневматическими, гидравлическими, оптическими и др.С развитием электротехники от механических логических элементов перешли к электромеханическим логическим элементам (на электромагнитных реле), а затем к электронным логическим элементам на электронных лампах, позже — на транзисторах. После доказательства в 1946 г. теоремы Джона фон Неймана об экономичности показательных позиционных систем счисления стало известно о преимуществах двоичной и троичной систем счисления по сравнению с десятичной системой счисления. От десятичных логических элементов перешли к двоичным логическим элементам. Двоичность и троичность позволяет значительно сократить количество операций и элементов, выполняющих эту обработку, по сравнению с десятичными логическими элементами.Логические элементы выполняют логическую функцию (операцию) над входными сигналами (операндами, данными).Логические элементы подразделяются и по типу использованных в них электронных элементов. Наибольшее применение в настоящее время находят следующие логические элементы:
РТЛ (резисторно-транзисторная логика)
ДТЛ (диодно-транзисторная логика)
ТТЛ (транзисторно-транзисторная логика)
29 Экономическое обоснование разработки и внедрения систем автоматического управления
Внедрение систем автоматического управления способствует повышению экономической эффективности производства, улучшению контроля качества продукта, повышению уровня санитарной обработки оборудования, повышению производительности оборудования, снижению затрат сырья и энергии. При разработке системы автоматического управления необходимо учитывать тот факт, что с увеличением ее сложности резко возрастают затраты на разработку, внедрение и эксплуатацию.
Поэтому до разработки системы управления необходимо проведение экономического анализа для решения вопроса о целесообразности ее внедрения с точки зрения повышения экономической эффективности производства.
Предварительный экономический анализ, связанный с вводом в эксплуатацию новых систем управления, может быть выполнен с помощью карты критических соотношений, которая представляет собой график зависимости расходов предприятия при внедрении системы автоматизации от объема производства.
График строится в обычных декартовых координатах. Ось абсцисс соответствует объему производства в единицах продукции за какой-то определенный промежуток времени или может быть выражена в процентах производственной мощности предприятия. На оси ординат откладываются расходы и доходы предприятия в денежных единицах. Учитывая тот факт, что карта критических соотношений составляется для какого-то ограниченного промежутка времени, можно принять, что объем оборотных средств остается постоянным и не меняется как функция от возрастающего объема производства или возрастающего использования производственных мощностей. Расходы на разработку и внедрение системы автоматизации условно представляют собой линейную функцию, возрастающую с увеличением объема производства.
Точка критического соотношения (ТКС) на графике характеризуется отсутствием прибыли и убытков предприятия, другими словами, она соответствует окупаемости затрат на автоматизацию, что позволяет наглядно судить о целесообразности и уровне разработок и ввода в эксплуатацию автоматических систем управления.
Целью технико-экономического обоснования (ТЭО) АС является количественное и качественное доказательство экономической целесообразности создания АС и программного изделия, а также определение организационно-экономических условий их эффективного функционирования. ТЭО разработки АС и программных изделий должно включать:
• доказательство целесообразности создания АС или программного продукта, анализа их технических, математических, информационных и организационных возможностей;
• расчет технико-экономических показателей, характеризующих результаты функционирования создаваемой АС и сравнения их с показателями аналога (варианта, выбранного за базу для сравнения), а также определения количественной оценки экономической целесообразности создания АС;
• расчет и анализ отдельных статей затрат на создание АС или программного изделия с результатами, определение условий и сроков окупаемости затрат;
• формулирование организационных условий эффективного функционирования создаваемых АС.
Технико-экономическое обоснование АС должно включать три части:
• системную часть, содержащую качественное определение социальной потребности данной системы и возможностей конкретной организации для ее эффективного функционирования;
• технико-экономическую часть, включающую расчет и сопоставление технико-экономических показателей спроектированной АС и аналога;
• организационно-экономическую часть, дающую краткую характеристику организационно-экономических условий обеспечения эффективного функционирования АС.
Системная часть должна включать оценку влияния данной АС на конечные результаты деятельности предприятия. В связи с различным назначением каждого типа АС различаются и критерии оценки социально-экономической эффективности. Однако все АС можно оценить по четырем основным критериям: качеству процессов и результатов АС; длительности процессов и срокам получения результатов; затратам на выполнение работ в АС; числу специалистов, занятых в автоматизированном процессе, и характеру их труда.
Технико-экономическая часть должна включать расчет следующих показателей:
• расчет капитальных затрат на организацию функционирования АС;
• расчет капитальных затрат на создание АС;
• расчет текущих затрат на функционирование АС;
• экономические результаты функционирования АС (в том числе стоимостную оценку результата, полученного в результате применения данной АС).
30 Регулятор выявляет отклонения регулируемой величины от заданного значения и усилив это отклонение преобразует его перемещение исполнительного механизма или в управляющий сигнал регулирующего органа. Он состоит из измерительного органа (датчика), управляющего устройства (устройство сравнения), задатчика, усилителя, исполнительного органа. По виду управляющего воздействия на регулирующий орган, регуляторы делятся на непрерывные и дискретные. В регуляторах непрерывного действия регулирующий сигнал подаётся на исполнительный орган непрерывно при наличии отклонения регулируемой величины от заданного значения. В регуляторах дискретного действия регулирующий сигнал подаётся на исполнительный орган через определённые интервалы времени. По виду регулируемой величины различают регуляторы температуры, давления, уровня, влажности, расхода и т.д. Регуляторы дискретного действия делятся на позиционные, импульсные и цифровые. Позиционным называют регулятор в котором регулирующий орган может занимать определённое число положений. Чаще всего применяют двух и трёхпозиционные регуляторы. В двухпозиционных регуляторах регулирующий орган может занимать только два положения: больше - меньше, открыто – закрыто, включен – отключен. Двухпозиционное регулирование осуществляется тем лучше, чем больше ёмкость объекта. Недостатком двухпозиционного объекта регулирования является невозможность сочетания быстрого регулирования, когда требуется большая мощность и высокая точность регулирования, когда требуется небольшая избыточная мощность.
В трёхпозиционных регуляторах регулирующий орган имеет ещё среднее положение в котором обеспечивается подача энергии или вещества в объект в количествах соответствующих его потреблению при нормальной нагрузке и заданном значении регулируемой величины. Трёхпозиционные регуляторы осуществляют более качественное регулирование, чем двухпозиционные. В импульсах регулятора отклонение регулируемой величины преобразуется в последовательность импульсов, следующих друг за другом через определённые интервалы времени. Импульсы могут отличаться амплитудой, длительностью. Импульсные регуляторы применяются для регулирования медленно протекающих процессов в объектах регулирования, обладающих большой инерционностью и значительным запаздыванием.
Цифровые регуляторы при регулировании используют микрокомпьютеры.
Регуляторы непрерывного действия делятся на пропорциональные (П), интегральные (И), дифференциальные (Д), пропорционально-интегральные (ПИ), пропорционально-дифференциальные (ПД) и пропорционально интегрально-дифференциальные регуляторы (ПИД).
Достоинства П-регуляторов: быстродействие, высокая устойчивость процесса регулирования; недостатки – наличие остаточного отклонения регулируемой величины. П-регуляторы применяют на любых объектах, когда изменение нагрузки незначительно.
Выбор типа регулятора. Позиционные регуляторы применяются в объектах с малым запаздыванием или постоянной нагрузкой. Они рекомендуются для одноёмкостных объектов без самовыравнивания. Импульсные регуляторы применяют в объектах без большого запаздывания, обладающих средней ёмкостью при постоянной или плавно меняющейся нагрузке.
П-регуляторы применяются в объектах допускающих некоторые отклонения регулируемой величины от заданного значения. При этом нагрузка объекта не должна иметь резких колебаний. Применяются в основном для одноёмкостных объектов.
И-регуляторы используются при регулировании объектов с большой степенью самовыравнивания, с различной ёмкостью, с небольшим запаздыванием и плавных изменениях нагрузки.
ПИ-регуляторы применимы на объектах с любой ёмкостью, с большим запаздыванием и с большими, не медленно изменяющимися нагрузками.
ПД-регуляторы применимы в объектах со средней ёмкостью, при большом времени запаздывания при малых измерениях нагрузки.
ПИД-регуляторы могут быть использованы в объектах с любой ёмкостью, с большим запаздыванием и при больших и резких изменениях нагрузки.