

1)Характеристика объектов управления
Объекты управления Объект регулирования основная часть системы автоматического регулирования, свойства которого определяют выбор типа регулятора и характеристики регулирования. Заданный режим объекта регулирования, должен поддерживаться регулирующими воздействиями извне. ^ Параметры, определяющие объект управления Нагрузка, емкость, самовыравнивание, инерционность, запаздывание, время разгона, постоянная времени разгона .
Объект, имеющий одну регулируемую величину относится к одномерным, при нескольких к многомерным.
Объект, параметры которого не изменяются во времени , является стационарным и нестационарным, если изменяются.
Воздействия на объект связанные с задачей регулирования называют, регулирующими, остальные возмущающими
Параметры объектов регулирования
Нагрузка-количество энергии или вещества, которое изменяется в объекте при проведении ТП
Емкость ( C ) -запас накопленной энергии или вещества
Коэффициент емкости - количество энергии или вещества, которое необходимо подвести или отвести от объекта с тем, чтобы изменить регулируемую величину на единицу измерения, т.е. отношение емкости объекта к значению регулируемой величины Кс = С/Х
Величина обратная коэффициенту емкости называется чувствительностью объекта к возмущению.
Объекты могут быть: - безъемкостные пример: небольшие трубопроводы -одноемкостные объекты, у которых нарушение равновесия между подачей и потреблением вызывают одновременные и одинаковые изменения регулируемой величины во всех точках емкости - многоемкостные, у которых имеются две или более емкостей, разделенных между собой термическим, гидравлическим или электрическим сопротивлениями. - самовыравнивание способность объекта без участия регулятора входить в новый режим работы. - объект, обладающий свойством самовыравнивания называют статическим - не обладающий астатическим. -способность объекта к самовыравниванию характеризуется степенью самовыравнивания - инерционность характеризует способность объекта к замедлению накапливать или расходовать энергию или вещество в результате наличия сопротивлений. - запаздывание отставание регулируемой величины. - время полного запаздывания складывается из транспортного /чистого/ и времени емкостного /инерционного/ запаздывания. - транспортное запаздывание это время, в течение, которого регулируемая величина не изменяется, несмотря на произведенное регулирующее воздействие. - емкостным запаздыванием называется запаздывание, зависящее от термических, гидравлических и других сопротивлений между емкостями. - время разгона - время в течение, которого регулируемая величина изменяется от нуля до заданного значения при мгновенном 100% изменении регулируемого воздействия и постоянстве его действия. - постоянная времени объекта это время его разгона при отсутствии самовыравнивания. Значение постоянной времени Т можно определить, если провести касательную к начальной точке кривой разгона. Отрезок, отсекаемый этой касательной на прямой параллельной оси абцисс, представляет собой постоянную времени объекта. Широко применяется метод переходных характеристик, по которому можно определить: - время запаздывания и природу его происхождения - степень самовыравнивания - скорость разгона Времени транспортного запаздывания соответствует отрезок bc между временем возмущения и моментом изменения регулируемой величины
Время емкостного запаздывания - проводится линия касательная в точке перегиба g ,отрезок cd
Время разгона между моментом внесения возмущения и моментом достижения регулируемой величиной установившегося значения
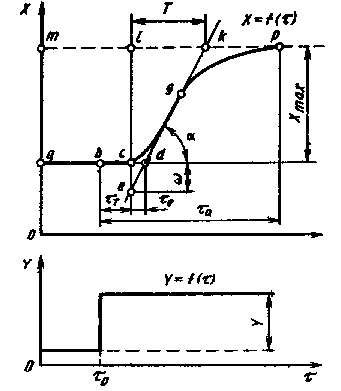 постоянная
времени - отрезок lk
постоянная
времени - отрезок lk
^ Задача сигнализации Обязательной сигнализации подвергаются все технологические параметры, определяющие взрывоопасность объекта. Кроме того также сигнализируются параметры характеризующие техническое состояние ТСА (вибрация, осевой сдвиг, температура подшипников, газотурбинных двигателей, между пусками, уровень заполнения полости насоса, температура хладоагента компрессора). Выделяют три уровня сигнализации: предупредительный, аварийный, блокировочный. Диапазон каждого последующего уровня соответственно уже предыдущего. Выбор уставок должен выбираться с учетом погрешности и быстродействия оборудования, а также с учетом скорости изменения параметров. Дополнительным плюсом является существование системы прогнозирования, которая еще до срабатывания системы сигнализации на основе анализа получаемых данных выдает сообщение о возможном состоянии объекта. Схема сигнализации, реализованная на логических элементах, кроме собственно сигнализации должна обеспечивать проверку сигнализационного оборудования путем нажатия кнопки квитирования, а также снятие звукового сигнала при возникновении аварийной ситуации.
2 Сущность принципа разомкнутого управления заключается в жестко заданной программе управления. То есть управление осуществляется «вслепую», без контроля результата, основываясь лишь на заложенной в САУ модели управляемого объекта. Водитель, уснувший за рулем, давит на газ, ребенок кидает и кидает монетки в автомат с газировкой. Автомат урчит, а газировка кончилась, Человек кипятит на огне воду. Вода выкипела, а огонь горит.
В этом случае требуемый закон регулирования обеспечивается только за счет задающего воздействия и никакими другими параметрами системы не контролируется, соответствие алгоритма функционирования системы, задающего систему, задается в этом случае, только за счет жестких кинематических связей всех элементов системы.
Принцип управления по возмущению
Он заключается в том, что для уменьшения или устранения отклонения управляемой величины (Хвых) от заданного значения (Хзад), которое вызывается возмущением L, измеряется это возмущение и превращается в управляющее действие (Хвх), которое компенсирует это отклонение
Регулированием называют управление, сопровождающееся непрерывным контролем. Параметр процесса, которым необходимо управлять называется регулируемой величиной (РВ). Различают три вида систем автоматического регулирования (САР): регулирование по отклонению, регулирование по возмущению и комбинированное регулирование как по отклонению, так и по возмущению. Регулирование по отклонению – в этом случае значение регулируемой величины сравнивается с некоторым заданным значением. Регулирование по возмущению – определяется одно или несколько возмущений и по их влиянию на РВ осуществляется регулирование. Недостатком такой САР является то, что она компенсирует влияние только одного (или нескольких) основного возмущения и не может предотвратить влияние на РВ других возмущений, чаще всего контролируемых. Комбинированные САР включают в себя оба рассмотренных принципа.