

6. Описание лабораторного стенда ивд-к
Лабораторный стенд состоит из приборного блока и электромеханического агрегата, соединенных между собой кабелем. Приборный блок подключен к сети переменного тока напряжением 220 В. На левой стороне приборного блока размещены разъем для подключения сетевого кабеля, сетевые выключатели (автомат +УЗО), разъемы для подключения кабелей БДПТ и двигателя постоянного тока.
На лицевой панели приборного блока (рисунок 9) приведена функциональна схема инвертора, блока управления, ПИ-регулятора и нагрузочного устройства, а также разъемы: «ДС» - для подключения кабеля датчика частоты вращения и «Компьютер», к которому подключается кабель последовательного интерфейса компьютера. Изображенные на функциональной схеме инвертор, блок управления и ПИ-регулятор входят в состав установленного в стенде блока MDC100-050101 и далее по тексту будут объединены в название «Блок управления БДПТ».
Электромеханический агрегат состоит из объединенных в одном конструктиве БДПТ BLY341D-48V-3200, работающего совместно с Блоком управления БДПТ MDC100-050101, и двигателя постоянного тока (ДПТ) МБП-3Ш-Н, валы которых жестко соединены. На валу ДПТ размещен датчик частоты вращения TRD-N30.
Нагрузочное устройство
На функциональной схеме нагрузочного устройства приведены цепи якоря и обмотки возбуждения ДПТ, который работает в режиме динамического торможения. Обмотка возбуждения ОВ получает питание от источника напряжения постоянного тока 27 В через выключатель SAв. Ток в ОВ контролируется амперметром РАв и регулируется переменным резистором Rв, который включен в цепь регулятора тока РТ. РТ выполняет функции стабилизации тока в ОВ и ее защиты.

Рисунок 9
Обмотка якоря ДПТ М1 подключается к тормозному реостату Rя через автоматический выключатель QFя на 10 А. Ток в обмотке якоря контролируется амперметром РАя .
Органы управления нагрузочного устройства размешены в правой части лицевой панели приборного блока. Условные обозначения органов управления соответствуют обозначениям на функциональной схеме нагрузочного устройства.
Блок управления БДПТ
Функциональная схема блока управления БДПТ содержит инвертор на транзисторах VT1…VT6 с обратными диодами VD1…VD6, к выходу которого подключен трехфазный синхронный двигатель М на постоянных магнитах со встроенным датчиком положения ротора (ДПР) на элементах Холла. На одном валу с двигателем расположен датчик частоты вращения (ДС – датчик скорости), а также нагрузочная машина М1. В фазе А синхронной машины М размещен датчик тока RS, клеммы которого выведены на лицевую панель. Кроме того, на лицевую панель выведены клеммы для контроля линейного напряжения UBC.
Транзисторный инвертор выполняет функцию преобразования напряжения постоянного тока Ud = 48 В в трехфазное регулируемое напряжение переменного тока, поступающее на фазы обмотки синхронного двигателя М. Выходное напряжение инвертора формируется посредством высокочастотной коммутации транзисторных ключей VT1…VT6 сигналами 1…6, поступающими на базы транзисторов от блока управления. Алгоритм коммутации приведен в разделе 5. Для подачи напряжения питания Ud на инвертор служит автоматический выключатель QF, при этом ток инвертора Id контролируется стрелочным измерительным прибором РА. Конденсатор С представляет собой сглаживающий фильтр.
Функциональная схема управляющей части инвертора содержит регулятор скорости и коммутатор. В состав регулятора скорости входят датчик частоты вращения ДС, формирующий сигнал обратной связи по скорости nДС, задатчик R для установки сигнала задания по скорости nЗ, сравнивающее устройство, формирующее сигнал ошибки err = nЗ - nДС, и ПИ-регулятор, содержащий пропорциональное и интегрирующее звенья, и служащий для обеспечения необходимых динамических параметров привода на БДПТ. Коммутатор входит в состав блока управления и формирует ШИМ-импульсы 1…6 частотой 15 кГц, закон модуляции которых является функцией сигнала Uупр, поступающего с выхода ПИ-регулятора, и сигналов, поступающих с ДПР. На вход блока управления поступает сигнал от выключателя SA1, с помощью которого осуществляется пуск и останов БДПТ. С помощью выключателя SA2 осуществляется реверс БДПТ. Выключатель SA3 осуществляет включение ПИ-регулятора в контур управления частотой вращения БДПТ. Справа от разъема «Компьютер» находится выключатель Компьютер/Автономно.
В верхней части функциональной схемы расположен блок индикации HG, который выводит значение частоты вращения вала двигателя в об/мин.
Описание интерфейса пользователя
На рисунке 10 показано окно интерфейса пользователя. Интерфейс пользователя предназначен для управления БДПТ и вывода на экран компьютера зависимостей частоты вращения n = f(t) и вращающего момента в M = f(t) в процессе пуска БДПТ. Приведем назначение и описание элементов интерфейса.
В левой части интерфейса пользователя размещены органы управления и индикации. В правой части – окно вывода зависимостей n = f(t) и M = f(t). В состав органов управления интерфейсом входят круговые стрелочные индикаторы «Вращающий момент» и «Частота вращения», показания которых дублируются расположенными ниже текстовыми полями «Нм» и «Об/мин». В левой нижней части интерфейса размещены секции «Работа» и «Печать».
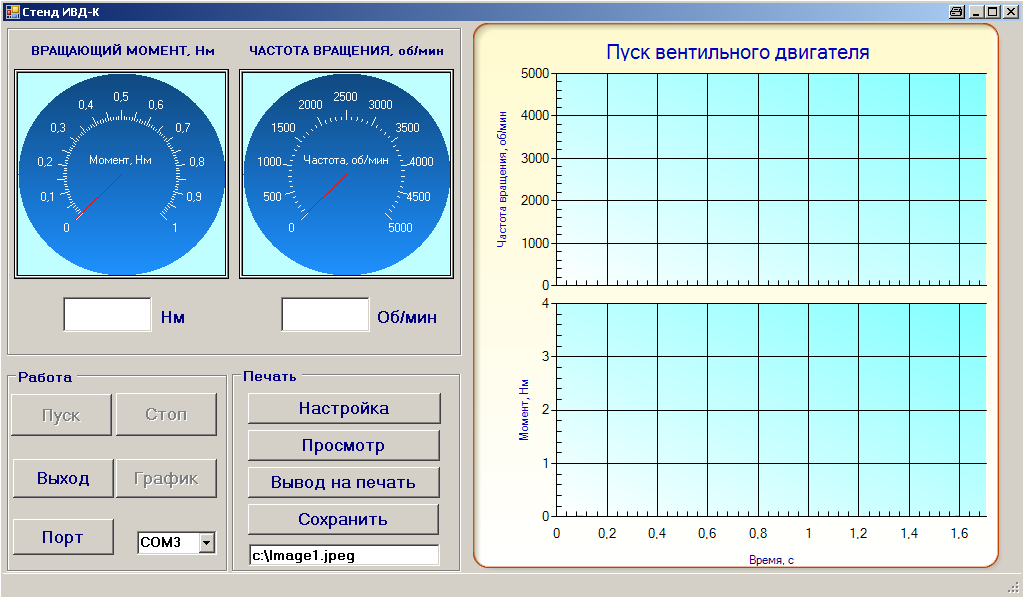
Рисунок 10
Секция «Печать» предназначена для вывода на принтер содержимого окна зависимостей n = f(t) и M = f(t) посредством кнопок Настройка (настройка печати), Просмотр (предварительный просмотр печати) и Вывод (печать содержимого окна), а также для записи на диск с помощью кнопки Сохранить и расположенного ниже текстового поля, куда можно ввести имя файла и путь.
Секция «Работа» содержит командные кнопки Пуск, Стоп, Выход, График, и Порт. Справа от кнопки Порт расположено окно списка, предназначенное для выбора последовательного порта компьютера.
Кнопки Пуск и Стоп служат для пуска и останова БДПТ. Кнопка График предназначена для вывода зависимостей n = f(t) и M = f(t). Кнопка Выход служит для окончания работы с программой интерфейса. Кнопка Порт предназначена для установки связи компьютера с микроконтроллером стенда по последовательному каналу, номер которого пользователь выбирает в расположенном справа окне списка. Кнопки Пуск, Стоп и График становятся доступны пользователю после установки связи компьютера с микроконтроллером.