

3.2. Структура системы
Структура микропроцессорной централизации приведена на рис. 3.1.
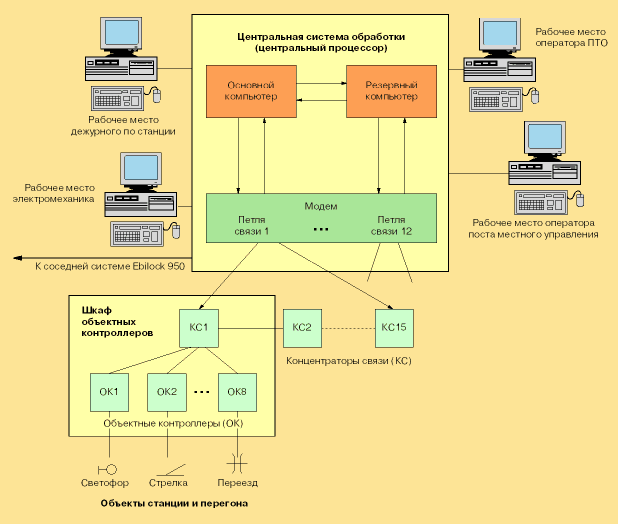
Рис. 3.1. Структурная схема МПЦ Еbi1оск-950.
С точки зрения функционального назначения в Ebilock-950 можно выделить четыре основных подсистемы:
диалоговую;
диагностики;
логических зависимостей;
управления и контроля состояния объектов.
В состав диалоговой подсистемы входит автоматизированное рабочее место дежурного по станции (АРМ ДСП), основными функциями которого являются: отображение путевого развития станции с индикацией текущего состояния объектов контроля и управления; обработка команд ДСП; регистрация событий; обработка сигналов о неисправностях; отображение журнала событий и списка неисправностей.
Применение стандартного персонального компьютера в качестве аппаратной реализации АРМ позволяет снизить стоимость, упростить эксплуатацию и обслуживание системы МПЦ. В АРМ использован широко распространенный оконный интерфейс пользователя, интуитивно понятный и легкий для освоения.
Подсистема диагностики в Еbi1оск-950 представлена в виде терминала электромеханика (АРМ ШН), на который поступает информация о различных неисправностях в системе, например, обрыве петли связи или перегорании лампы в светофоре. Пользовательские интерфейсы и общие принципы построения АРМ ДСП и АРМ ШН во многом схожи. В АРМ ШН сокращен набор допустимых команд и отсутствует окно, отображающее мнемосхему станции.
Реализация логических взаимозависимостей между станционными объектами в соответствии с требованиями безопасности движения поездов осуществляется на уровне подсистемы логических зависимостей. Технической основой это подуровня системы МПЦ является ПМЦ, структура аппаратного и программного обеспечения которого обеспечивает заданные параметры безотказности и безопасности. ПМЦ состоит из двух компьютеров, один из которых находится в работе, а другой—в «горячем» резерве. В состав каждого компьютера входят два аппаратных канала обработки информации. Функции, к которым предъявляются требования по безопасности, реализуются в двух независимых вычислительных каналах, а функции, связанные с поддержанием интерфейса внешних устройств и системы объектных контроллеров, обеспечивает сервисный процессор.
Компьютер «горячего» резерва постоянно актуализирует данные, поэтому система всегда готова перейти на него в случае отказов или сбоев в основном.
Для непосредственного контроля и управления станционными объектами (стрелки, светофоры, рельсовые цепи и т.д.) служит система объектных контроллеров.
Каждый объектный контроллер может управлять и контролировать один или несколько напольных объектов в зависимости от их типа, используя для этого микропроцессор со специальной программой.
3.3. Процессорный модуль централизации
3.3.1. Аппаратные средства
Процессорный модуль централизации состоит из модулей, установленных в 19-дюймовый корпус, содержащий пассивную объединительную плату для межмодульной связи и распределения питания. ПМЦ занимает как левую, так и правую половины корпуса. Модули устанавливаются парами, что соответствует основному и резервному комплекту.
В состав процессорного блока входят следующие модули:
-питания (PSM);
-дисковый и сетевой (DEM);
-центрального процессора (СРМ);
-ввода-вывода (IOМ).
Модуль питания формирует напряжения для функционирования ПМЦ: +5 В/10 А;+12 В/30 А; -12 В/0,5 А, а также обеспечивает защиту от короткого замыкания, индикацию пропадания выходного напряжения, сохранение в течение 30 мс выходного напряжения при пропадании входного.
Дисковый и сетевой модуль состоит из двух отдельных подсистем: сетевого интерфейса и жесткого диска. Подсистема сетевого интерфейса предназначена для подключения ПМЦ к различным внешним устройствам, например к АРМ ШH, а на этапе разработки—к общей сети предприятия. Разъем может также использоваться для подключения к системе АРМ ДСП.
Подсистема жесткого диска содержит SCSI-контроллер, внутренний жесткий диск и внешний SCSI-разъем, к которому можно подключить до пяти различных SCSI- совместимых устройств, например жесткие диски, CD-устройства и ленточные накопители.
Модуль центрального процессора состоит из трех одинаковых процессоров Motorola68030 с тактовой частотой 32 МГц с межмодульной шиной и двух интерфейсов двойного канала.
Три процессора, размещенных на плате СРМ, называются соответственно безопасным процессором A (FSPA), безопасным процессором В (FSPA) и сервисным процессором (SPU). Два первых выполняют все правила централизации, а последний отвечает за операции ввода-вывода и управления.
Модуль ввода-вывода обеспечивает связь с объектными контроллерами. Для этого в состав каждой платы входят
- COS порт (RS232);
- два возможных типа портов, для связи с концентраторами. Оба типа могут устанавливаться на одном модуле IOМ в любой комбинации и конфигурируются в проектных данных; внутреннее соединение для чтения (записи) данных в (из) модуля СРМ.
В каждом модуле может быть максимально четыре порта, а в каждой половине IPU950—по три модуля IOМ, в зависимости отколичества напольного оборудования. Платы IOМ работают парами, так что в системе должно быть необходимое количество плат, т.е. количество плат IOМ в левой половине IPU950 должно соответствовать количеству IOМ, установленных в правой половине.