

6.4. Конверторы
Конвертор является основным технологическим агрегатом современного сталеплавильного производства. Он предназначен для переработки (конвертирования) жидкого чугуна в сталь заданного химического состава путем продувки чугуна кислородом. В соответствии с ГОСТ установлен следующий ряд конверторов вместимостью (по массе жидкой стали): 50, 100, 130, 160, 200, 250, 300, 350 и 400 т.
Конвертор представляет собой грушевидный стальной сосуд, футерованный внутри огнеупорным кирпичом. В средней части опоясан массивным кольцом с цапфами. Вверху имеется горловина, через которую заливают чугун, подают скрап и различные добавки, а также сливают сталь и шлак. Через горловину с помощью фурмы подается в конвертор кислородное дутье. Центр тяжести и ось вращения взаимно расположены так, что при аварийном прекращении управления наклоном, конвертор возвращается в вертикальное положение.
Основными механизмами конвертора являются механизм поворота, а также механизм подъема и перемещения кислородной фурмы.
Конверторы до 130 т оборудуются односторонним механизмом поворота (за одну цапфу), а более емкие конверторы – двухсторонним (за обе цапфы). Поворот конвертора происходит часто – до 20 раз за цикл работы. Углы поворота могут меняться от 15 до 180 в обе стороны.
Особенностью привода механизма поворота является то, что поворот конвертора изменяется в широких пределах от 1 об/мин до 0,04 об/мин. Точность регулирования скорости при сливе металла и шлака должна быть не хуже 2 %. Очень жесткие требования предъявляются к плавности хода, т. е. ограничению ускорения при разгоне и замедлении.
В механизмах поворота конверторов применяют в основном многодвигательные приводы навесного типа. Каждый редуктор приводится двумя фланцевыми двигателями постоянного тока. Все элементы привода навешены на цапфу конвертора. Навесной привод не критичен к перекосу цапф, компактен, но требует равномерное распределение нагрузки между двигателями, что усложняет схему управления по сравнению со стационарным приводом.
Оптимальным является четырехдвигательный привод, по два двигателя на одну цапфу. Для равномерного распределения моментов между двумя цапфами применяется последовательное включение двух двигателей, работающих на разные цапфы. Обычно мощность одного двигателя составляет 60 кВт. При разработке схемы управления электроприводом поворота конвейера реализуются сложные законы движения и обеспечиваются высокая точность и плавность движения. Это достигается за счет использования тиристорных преобразователей, систем подчиненного регулирования и цифровых следящих систем.
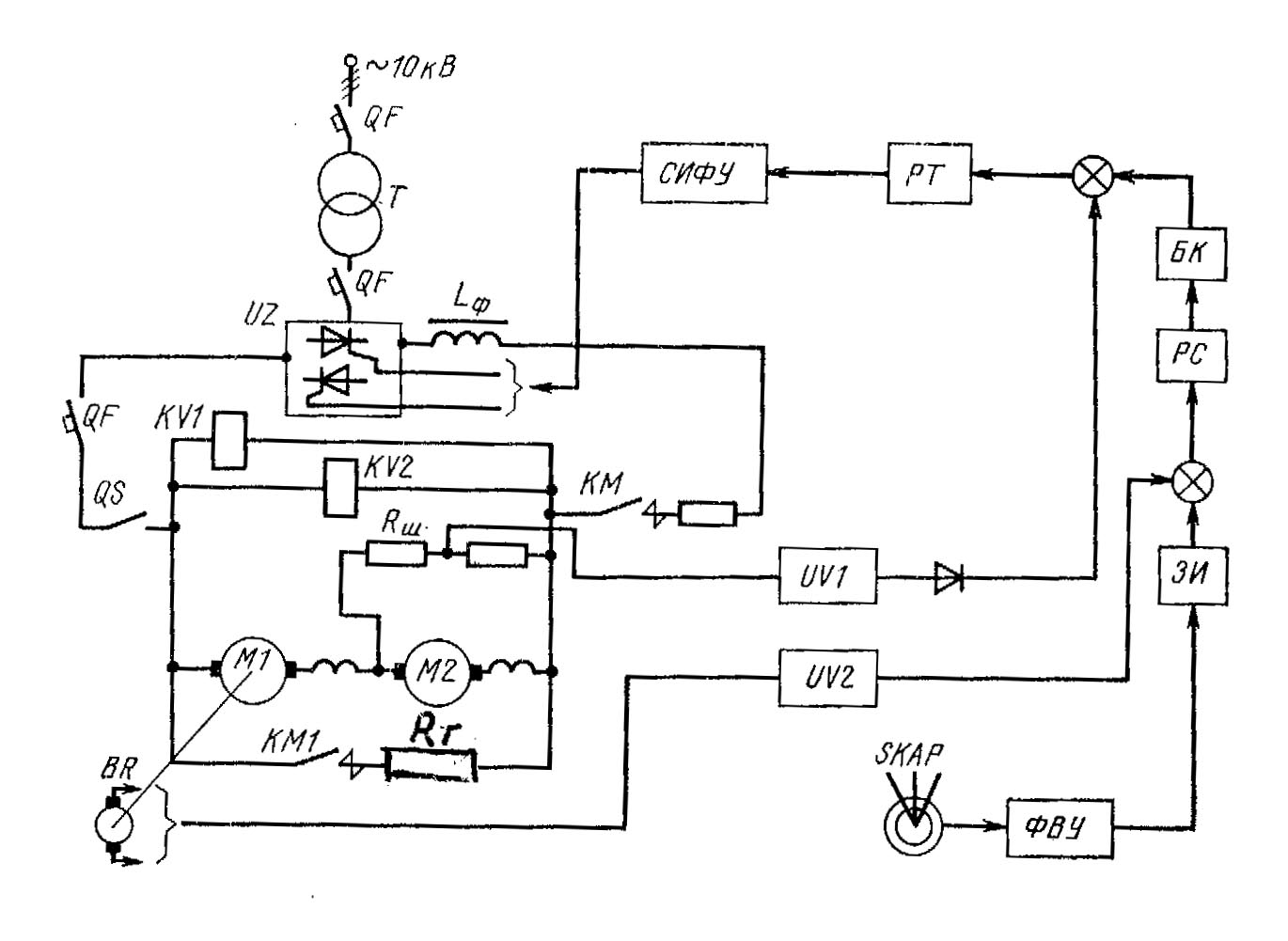
Рис. 6.3. Схема электропривода поворота конвертора.
На рис. 6.3 представлена схема электропривода механизма поворота конвертора для одной пары двигателей. В качестве задающего скорость аппарата используется сельсинный командоаппарат SKAP, позволяющий плавно задавать скорость поворота во всем диапазоне регулирования.
В связи с необходимостью стабилизации заданной скорости поворота конвертора при изменяющемся статическом моменте, в качестве основной обратной связи выбрана отрицательная обратная связь по скорости двигателей. Контур регулирования скорости реализуется тахогенератором BR, преобразователем UV2 и регулятором скорости РС. Контур регулирования тока образован сопротивлением шунта Rш, преобразователем, UV1 и регулятором тока РТ. Другие обозначения в схеме: QF - автомат; T – силовой трансформатор; QS - разъединитель; UZ – реверсивный тиристорный преобразователь; Lф – сглаживающий реактор; KM – контактор пуска; Rт - реостат динамического торможения; KV1, KV2 – реле напряжения (скорости), БК – блок ключей, определяющий реверс преобразователя; SИ – задатчик интенсивности, определяющий ускорение поворота; ФВУ – фазочувствительное выпрямительное устройство.
Управление приводом поворота конвертора может осуществляться из трех мест (пультов), сблокированных между собой. На центральном посту установлен избиратель поста управления. После выбора местного управления оператор на местном посту может взять управление на себя.
Скорость поворота задается оператором с помощью сельсинного командоаппарата SKAP. Задатчик интенсивности ЗИ формирует кривую тока и задает темп разгона.
Схема предусматривает различные виды защит и блокировок: исправность якорной цепи; наличие тока в обмотках возбуждения двигателей, контроль тока тормозных электромагнитов; нулевое положение командоаппарата; исправность тахогенератора; включение линейных контакторов двигателей; контроль скорости. Для аварийной остановки используется динамическое торможение с наложением механических тормозов при снижении скорости до 15 % от номинальной.