

1.3. Информация в системах управления электроснабжением железных дорог
Общие понятия и определения. Во всех автоматических устройствах, системах телемеханики, вычислительных машинах от одних частей и узлов к другим осуществляется передача сведений о происходящих в них процессах и явлениях, т.е. информации.
Информация представляет собой сведения, содержащиеся в сообщении, заранее неизвестные получателю.
Сообщение — это сведения о некотором событии или явлении, которые необходимо передать от источника сообщений к получателю сообщений. Сообщения передаются с помощью сигналов по каналам связи.
Сигнал — физический процесс, определенные параметры которого соответствуют некоторому сообщению. Сигнал всегда порождается некоторым фактом, событием или явлением и имеет независимую от него физическую природу. Между сигналом и сообщением существует условное соответствие, как между деталью и ее чертежом.
Сигналы существуют в пространстве и во времени независимо от тех событий, которыми они были порождены. Читая книги, рассматривая фотографии, получая информацию по радио и телевидению, мы узнаем о событиях, давно прошедших или происходящих сейчас (прямое включение с места событий) рядом с нами или на значительном расстоянии.
В процессе передачи и приема сигнала осуществляются его многократные преобразования из одной формы в другую. Например, принимаемый радиосигнал преобразуется в электрический, который в свою очередь — в звуковой или световой. При передаче сигналов происходит обратное преобразование.
Сигналы могут взаимодействовать друг с другом, образуя новые сигналы и сообщения, причем смысл нового сообщения будет отличен от смысла сообщения каждого из взаимодействующих сигналов.
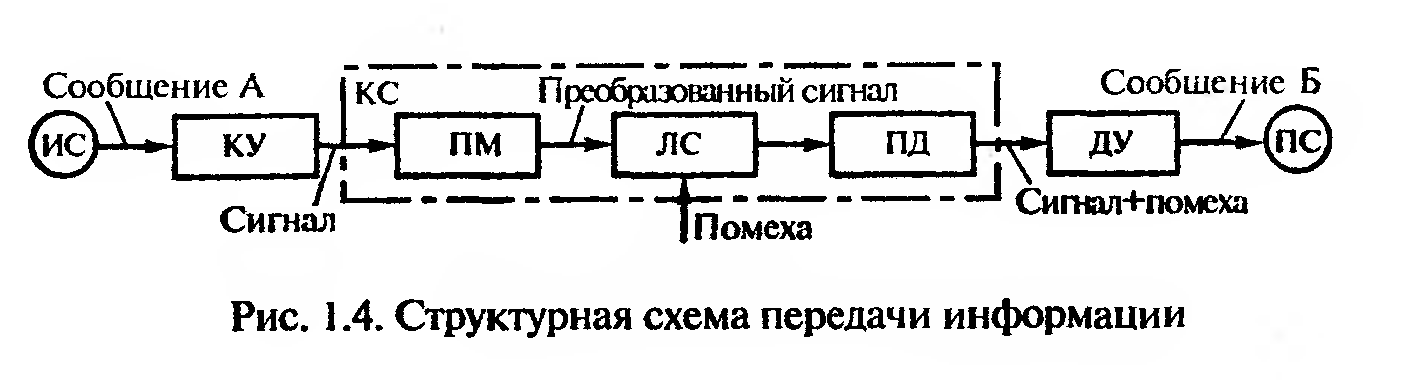
Система передачи информации (рис. 1.4) состоит из источника сообщения (ИС), кодирующего устройства (КУ), преобразующего сигнал в вид, удобный для передачи по каналу связи (КС), состоящему из передатчика — модулятора (ПМ), линии связи (JIC), приемника-демодулятора (ПД), преобразующего сигнал в первоначальный вид, декодирующего устройства (ДУ), преобразующего сигнал в сообщение, получателя сообщений (ПС).
Канал связи представляет собой совокупность технических средств, с помощью которых обеспечивается независимая передача различных сообщений по одной линии связи. В процессе передачи сигнала по каналу связи на него могут воздействовать помехи.
Помеха — это любое мешающее воздействие, возникающее в процессе передачи сигнала. Различают аппаратные помехи и помехи от внешних воздействий. Помехи могут частично или полностью исказить передаваемое сообщение А в сообщение Б, принятое получателем ПС. Задача передачи информации по каналу связи будет выполнена, если сообщение Б, принятое ПС, точно соответствует переданному сообщению А.
По своему характеру информация, передаваемая в системах управления устройствами электроснабжения, может рассматриваться как оперативная, предназначенная для постоянного контроля за состоянием системы электроснабжения и непосредственного управления ею с диспетчерского пункта; статистическая, предназначенная для обработки, обобщения и анализа результатов эксплуатации системы электроснабжения, планирования и нормирования производственных процессов; отчетная, используемая для составления отчетных документов.
По назначению информация в системе электроснабжения делится на распорядительную (об управлении и регулировании режимов работы электроустановок); сигнальную (о положении и состоянии контролируемых объектов); измерительную (о величине контролируемых параметров).
Количество сообщений и количество информации. Каждое событие или явление может иметь N различных состояний. Сигнал, описывающий это событие, должен также иметь N состояний. Пусть требуется передавать на диспетчерский пункт информацию о состоянии четырех (п = 4) выключателей на контролируемом пункте. Каждый выключатель имеет два состояния: «включен» и «отключен» (т = 2). Обозначим отключенное состояние выключателя «О», включенное — «1» и запишем все возможные сообщения о состоянии четырех выключателей.
Таблица 1.1
Сообщения о состоянии выключателей
Номер сооб щения |
Состояние выключателей |
Номер сообще ния |
Состояние выключателей |
||||||||
1 |
2 |
3 |
4 |
1 |
2 |
3 |
4 |
||||
1 |
0 |
0 |
0 |
0 |
9 |
1 |
0 |
0 |
0 |
||
2 |
0 |
0 |
0 |
1 |
10 |
1 |
0 |
0 |
1 |
||
3 |
0 |
0 |
1 |
0 |
11 |
1 |
0 |
1 |
0 |
||
4 |
0 |
0 |
1 |
1 |
12 |
1 |
0 |
1 |
1 |
||
5 |
0 |
1 |
0 |
0 |
13 |
1 |
1 |
0 |
0 |
||
6 |
0 |
1 |
0 |
1 |
14 |
1 |
1 |
0 |
1 |
||
7 |
0 |
1 |
1 |
0 |
15 |
1 |
1 |
1 |
0 |
||
8 |
0 |
1 |
1 |
1 |
16 |
1 |
1 |
1 |
1 |
||
В табл. 1.1 перечислены все возможные сообщения о состоянии четырех выключателей от первого (все выключатели отключены) до шестнадцатого (все выключатели включены). Нетрудно убедиться, что между числом сообщений (N= 16), количеством объектов (и = 4) и числом их состояний (т = 2) существует зависимость 16 — 24, которую можно при произвольных тип записать как
N=m. (1.1)
Число возможных сообщений является некоторой мерой информации. Однако пользоваться этой мерой неудобно, так как существует степенная зависимость между количеством сообщений и числом объектов, о которых необходимо передавать эти сообщения. В системе телеуправления «Лисна-Ч» можно передавать сообщения о 126 объектах тяговых подстанций (п = 126). Количество сообщений, которое при этом может быть передано (N = 2126), определяется числом 1038.
Для измерения информации более удобна логарифмическая мера, которая позволяет получить линейную зависимость между количеством информации и числом объектов или числом элементов в сигнале, с помощью которого передается информация:
I = loge N = пlog,, т, (1.2)
где а — основание логарифма, может быть любым, но более удобно принять а = 2.
При т = 2 выражение (1.2) можно записать
I =log2 N = nlog2 2 = п. (1.3)
За единицу количества информации принимают информацию, содержащуюся в сообщении об объекте, имеющем два состояния. Сигнал, который описывает данное событие, имеет также два состояния. Единица количества информации носит название бит от сокращения английских слов (двоичная единица).
Таким образом, если двоичный сигнал состоит из одного элемента, он несет один бит информации и с его помощью может быть передано только два сообщения типа «да-нет» (включено-отключено, 1-0)
Выражение (1.2) определяет наибольшее количество информации, которое может содержаться в передаваемом сигнале. Фактическое значение количества информации / может быть значительно меньшим.
При прохождении сигналов по каналам связи передаются определенные сообщения. В них кроме полезных могут быть заранее известные или бессмысленные сведения. Истинное значение информации в сообщении определяется лишь полезными сведениями.Разница между истинным и наибольшим значением информации представляет собой избыточную информацию. Уменьшая избыточную информацию в реальных сообщениях, можно канал связи использовать более эффективно. Повседневно мы осуществляем сокращение избыточной информации, не думая о понятии «информация». Например, посылая поздравительную телеграмму, мы опускаем в тексте знаки препинания, предлоги, отдельные слова, имея в виду, что получателю и так будет понятен смысл сообщения.
Однако в ряде случаев избыточная информация может быть полезной, помогая восстанавливать информацию при ее искажении помехой. Для повышения гарантии получения переданной информации без потерь нередко передают избыточную информацию. Так, например, в телеуправлении команда «Включить»-«Отключить» передается два раза, полное совпадение двух кодовых серий гарантирует отсутствие искажений команды.
Непрерывные и дискретные сигналы. Сигналы как и сообщения бывают непрерывные и дискретные. Непрерывные сигналы могут отличаться друг от друга на очень малую величину. Дискретные сигналы представляют собой позиционные команды «Включить- Отключить», «Открыть-Закрыть» и т.п. Непрерывные сигналы используются в системах телеизмерения, а дискретные — в устройствах телеуправления и телесигнализации.
Типичным примером дискретных сообщений и сигналов является передача информации о состоянии выключателей на подстанции. Сигнал при этом состоит из импульсов, параметры которых, соответствующие включенному состоянию выключателей, существенно отличаются от параметров импульсов, несущих информацию об отключенном состоянии выключателей. Между этими двумя значениями сигнал, как и само состояние выключателей, промежуточных значений не имеет (невозможно представить, что выключатель включен или отключен частично).
Передача дискретных сигналов имеет ряд преимуществ перед передачей непрерывных сигналов. Чтобы передать непрерывное сообщение, представленное непрерывной функцией времени X(i), ее разбивают на ряд дискретных значений. Замену непрерывного сообщения дискретным называют квантованием (дискретизацией). Квантование сигнала осуществляют либо по амплитуде, либо по времени. Замена непрерывного сигнала дискретным приводит к дополнительной погрешности. Однако это не существенно, если она не велика по сравнению с погрешностями, вызванными другими причинами.
На рис. 1.5 представлено квантование сигнала по амплитуде. При квантовании по амплитуде кривую X(t) разбивают на равные интервалы АХ по вертикали и заменяют ступенчатой характеристикой X'(t) Интервал АХ называют шагом квантования. При заданном шаге квантования число дискретных значений сигнала (разрешенных уровней) в пределах изменения функции X{t) от Хтах до Xmin равно:
![]() (1.4)
(1.4)
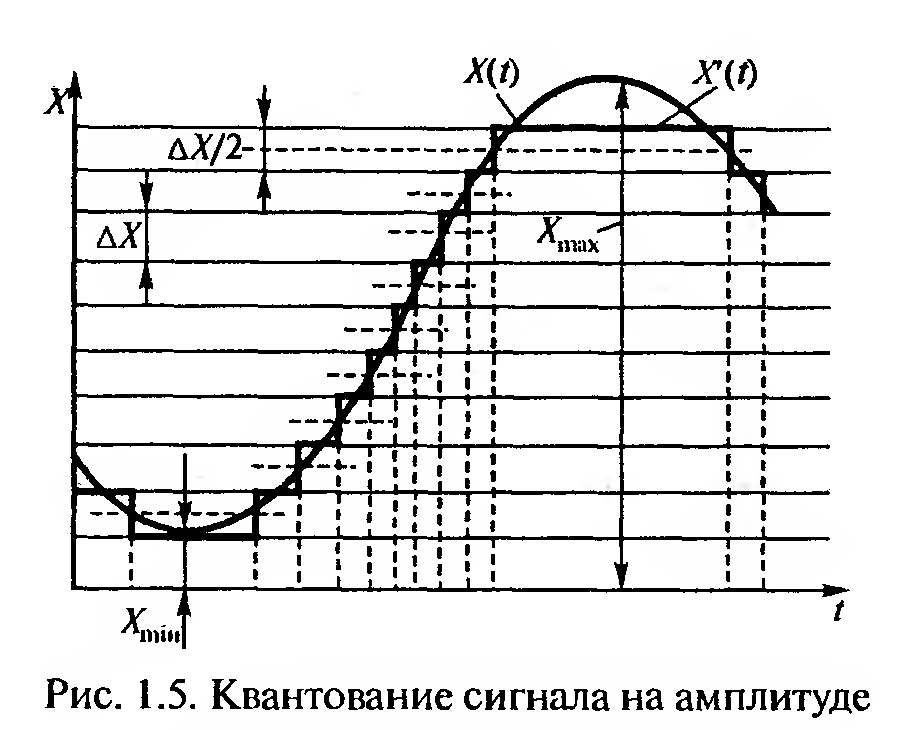
Если мгновенное значение функции попадает внутрь интервала, то оно заменяется ближайшим разрешенным. Переход с одного уровня на другой происходит в момент, когда значение функции находится в середине интервала квантования, так как именно в этот момент абсолютная погрешность квантования оказывается наибольшей.
Погрешность квантования определяется выражением
![]() (1.5)
(1.5)
Из выражений (1.4) и (1.5) видно, что с уменьшением АХ и увеличением N погрешность уменьшается.
При квантовании по времени кривую X(t) разбивают на равные интервалы по горизонтали и передают только те значения сигнала, которые совпадают с началом (или концом) каждого интервала. Следовательно, при квантовании по времени передача сигналов происходит в определенные фиксированные моменты времени.
Теоретически скорость передачи информации по каналу связи, определяющая пропускную способность канала, может быть выражена формулой
![]() (1.6)
(1.6)
где ∆FK — ширина полосы канала связи (полоса частот, которую пропускает канал);
 — отношение
мощности сигнала к мощности помехи.
— отношение
мощности сигнала к мощности помехи.
" Если в секунду передается с бит информации, то за время работы канала связи Тк можно передать количество информации
![]() (1.7)
(1.7)
Мощность сигнала Рс не может быть больше мощности Рк, допустимой в канале. Приняв Рс= Рк, получим выражение, определяющее наибольшее количество информации в канале:
 (1.8)
(1.8)
![]() (1.9)
(1.9)
где Нк — динамический диапазон канала связи.
По аналогии можно записать выражение объема сигнала:
![]() (1.10)
(1.10)
где Fc — ширина полосы частотного спектра сигнала; Тс — длительность сигнала; Нс — динамический диапазон сигнала
Необходимым условием передачи сигнала по каналу связи является Ук > Ус, но при этом должны быть выполнены и достаточные условия: FK > Fc; Тк > Тс; Вк > Нс.
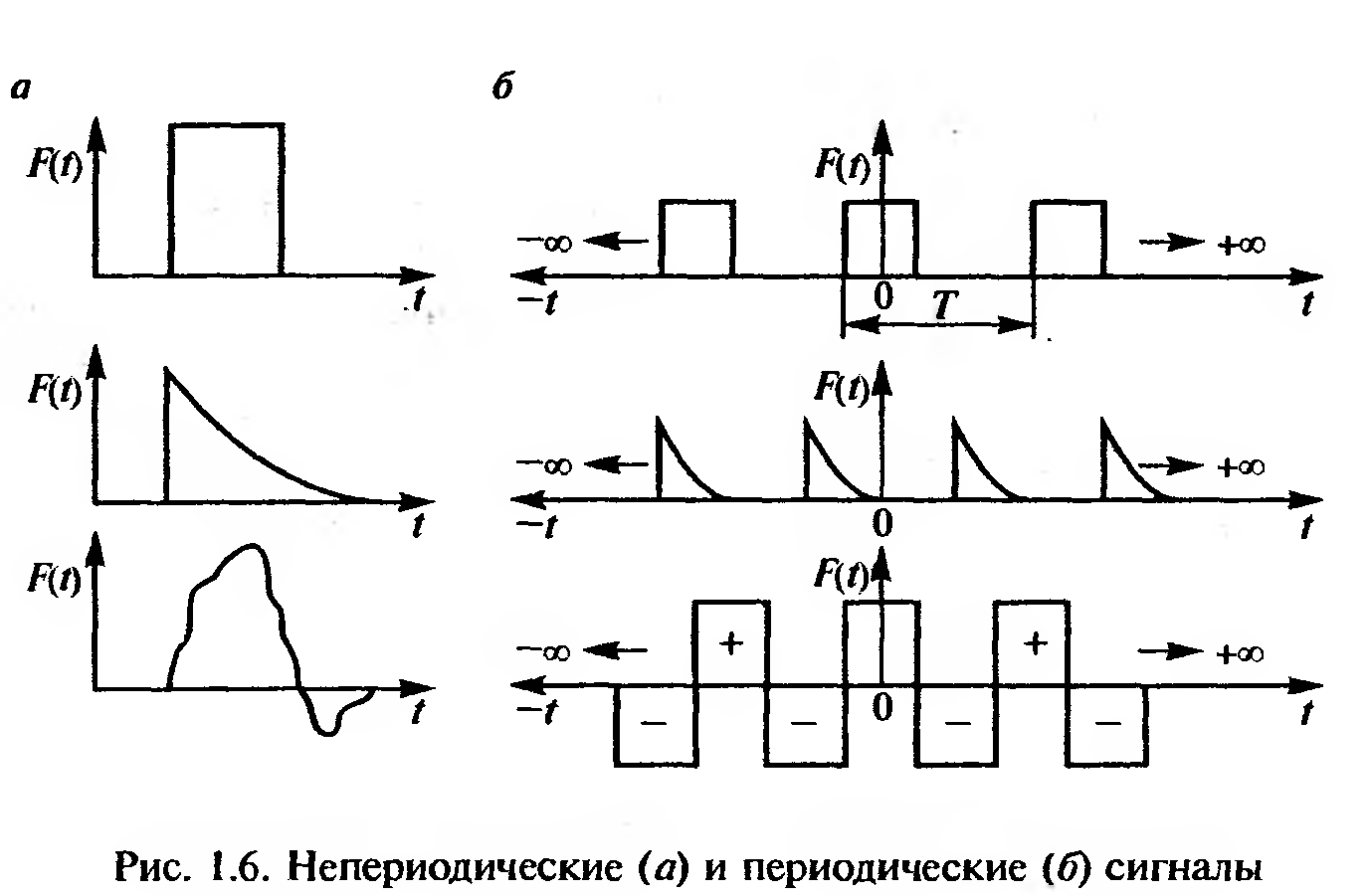
Сигналы и их спектры. Телемеханические сигналы, передаваемые по проводным линиям и радиоканалам, представляют собой электрическую величину, изменяющуюся во времени.В последние годы начинают широко применяться оптические сигналы, передаваемые по волоконно-оптическим кабелям. Различают сигналы непериодические и периодические. Первые являются непериодической функцией времени, в простейшем случае — это одиночные импульсы произвольной формы (рис. 1.6, а). Вторые являются периодической функцией времени и представляют собой бесконечную временную последовательность импульсов с одинаковой формой и периодом повторения Т (рис. 1.6, б).
Любая периодическая
функция времени F[t) может быть представлена в виде суммы ряда синусоидальных колебаний (ряда Фурье) с определенными амплитудами Ar начальными фазами ᵠi;- и частотами со. Следовательно, любой периодический сигнал можно представить в виде ряда
![]() (1.11)
(1.11)
где —A0
постоянная составляющая (амплитуда
нулевой гармоники);A1,
А2,
А3—
амплитуда соответственно гармоник
1,2,3; ω = 2πf — угловая
частота первой гармоники; f
=
 — частота первой гармоники в Гц; Т—
период повторения импульсов, с.
— частота первой гармоники в Гц; Т—
период повторения импульсов, с.
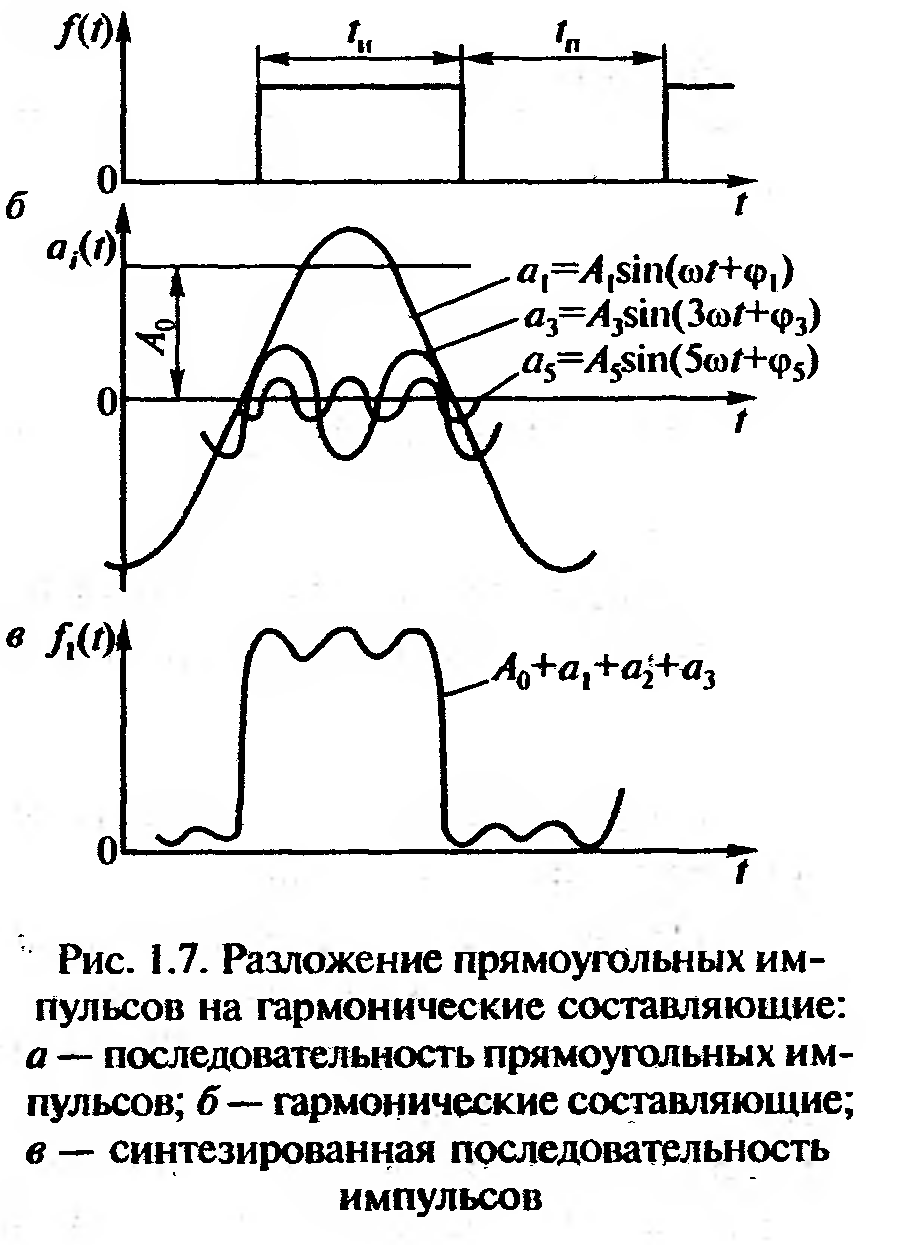
На
рис. 1.7
представлен
результат процесса разложения
прямоугольных импульсов (рис. 1.7,
а)
на
гармонические составляющие (рис. 1.7,
б). Так
как амплитуда гармоник, номера
которых кратны отношению
 при tи
≤ tп
или
при tи
≤ tп
или
 при tп
≤
tи
обращаются в
нуль, то при tи
= tп
при tп
≤
tи
обращаются в
нуль, то при tи
= tп
 2
т.е. гармоники, номера кото-
2
т.е. гармоники, номера кото-
рых кратны 2 (четные), обращаются в нуль. По этой причине на рис. 1.7, б отсутствуют четные гармоники. Амплитуда гармоник по мере возрастания частоты (номера) снижаются. На рис. 1.7, в показана последовательность, полученная в результате сложения нулевой A0, первой, третьей и пятой гармоник. Кривая наглядно показывает, что чем больше гармоник суммируется, тем ближе синтезированная последовательность совпадает с исходной (рис. 1.7, а).
Чтобы при передаче сигнала, состоящего из последовательности прямоугольных импульсов, не произошло искажений, нужно передать по каналу весь бесконечный ряд гармоник в соответствии с выражением (1.11). Практически осуществить это невозможно, так как потребовался бы канал с бесконечной полосой пропускания. Обычно допустимы некоторые искажения формы сигнала, что позволяет ограничиться передачей конечного числа гармонических составляющих.
Амплитуды гармонических составляют , графически представляются в координатах Ак и в виде отдельных спектральных линий (где к номер гармоники). Совокупность амплитуд Ак гармонических составляющих представляет собой спектр амплитуд, который называют линейчатым, т.к. он состоит из отдельных спектральных линий.
На
рис. 1.8
приведены спектры амплитуд
последовательностей прямоугольных
импульсов одинаковой длительности,
но с различными периодами Т.
Амплитуды гармоник с частотами, кратными
 ,
обращаются в нуль, т.к. номер первой
гармоники
с нулевой амплитудой
,
обращаются в нуль, т.к. номер первой
гармоники
с нулевой амплитудой
 (или
(или
 ), а её частота
), а её частота
![]()
Если нет специальных оговорок относительно величины искажения импульсов при передаче, то достаточно ограничиться передачей только тех гармоник, частоты которых лежат между началом координат и частотой первой гармоники из числа тех, амплитуды которых равны нулю (первый «лепесток» спектра).
В этом случае ширина спектра сигнала или
необходимая для передачи полоса канала связи определяется выражением.
 (1,12)
(1,12)
Из приведенных формул видно, что полоса пропускания канала связи обратно пропорциональна длительности наиболее короткого элемента сигнала (импульса или паузы).
Непериодические
сигналы можно рассматривать как
периодические с периодом повторения,
равным бесконечности. На рис. 1.8 приведены
спектры периодической последовательности
прямоугольных импульсов одинаковой
амплитуды и длительности, но с разными
периодами повторения. Из приведенных
спектров видно, что при увеличении
периода Т
частотное расстояние между спектральными
линиями уменьшается, а количество линий
увеличивается. Нетрудно представить,
что при увеличении периода до бесконечности
спектральные линии сближаются настолько,
что сливаются между собой, а их число
увеличивается до бесконечности на любом
конечном интервале частот. В этом случае
нет необходимости говорить об отдельных
гармонических составляющих сигнала,
и поэтому вводят понятие спектральной
плотности S(f)
как
функции частоты. График спектральной
плотности одиночного прямоугольного
импульса показывает, что огибающая
кривая обращается в нуль при частотах:
 ,
где
к
—
1,
2,
3 и т.д.
,
где
к
—
1,
2,
3 и т.д.

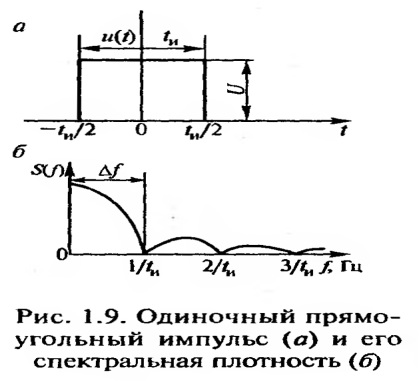
Для передачи сигнала используют предельно малую ширину спектра, но такую, чтобы в ней была сосредоточена основная энергия сигнала. Из рис. 1.9 видно, что наибольшая энергия сигнала сосредоточена в пределах первого «лепестка» спектра. Отсюда необходимая для передачи полоса канала связи определяется выражением:
∆f= (1,13)
Для передачи информации по каналу связи необходимо иметь переносчик сигналов, в качестве которого может быть использован любой физический процесс, способный распространяться в пространстве. Переносчиками информации могут быть, например, звуковые волны, свет и т.д. В автоматизированных системах в качестве переносчика сигналов используют электрический ток, способный практически мгновенно распространяться по проводам на большое расстояние. Для нанесения сигнала на переносчик (электрический ток) необходимо воздействовать на параметры переносчика с целью их изменения во времени по заданному закону.
Модуляция — процесс нанесения информации на переносчик, а параметры переносчика, на которые воздействуют при нанесении информации, называются качествами (признаками) электрического тока.
В качестве переносчика информации может быть использован постоянный ток, переменный синусоидальный ток или периодическая последовательность импульсов. При модуляции постоянного тока можно воздействовать на его амплитуду (тока или напряжения) (рис. 1.10, а). Гармонические колебания переменного тока характеризуются амплитудой, частотой и фазой (рис. 1.10 б, в, г), а периодическая последовательность импульсов — амплитудой, шириной (временем) импульсов, частотой повторения, фазой и полярностью (рис. 1.10 д, е, ж, з, и).

Рис. 1.10. Признаки электрического тока: а — амплитудный при постоянном токе; б, в, г — амплитудный, частотный и фазовый при гармоническом колебании; д, е, ж, з, и — амплитудный, временной, частотный, фазовый и полярный при несущей периодической последовательности импульсов
К признакам электрического тока предъявляют следующие основные требования: возможность получения большого числа состояний признака; простота образования и обнаружения признака; возможность независимой передачи в одной физической среде, например, в линии связи; способность противостоять помехам и воздействиям линии связи и аппаратуры.
Наиболее универсальным является частотный признак, который может иметь неограниченное число состояний и позволяет одновременно передавать по одной линии несколько состояний. Амплитудный, признак больше подвержен действию помех, чем частотный.
Вид модуляции определяется переносчиком и его параметром (признаком), на который воздействуют при нанесении информации. При постоянном токе в качестве переносчика возможна амплитудная модуляция (AM).
Гармоническое колебание характеризуется амплитудой, частотой и фазой, и может быть описано выражением:
![]() (1,14)
(1,14)
где А0, ω0, ᵠ0— соответственно амплитуда, частота и начальная фаза несущего колебания.
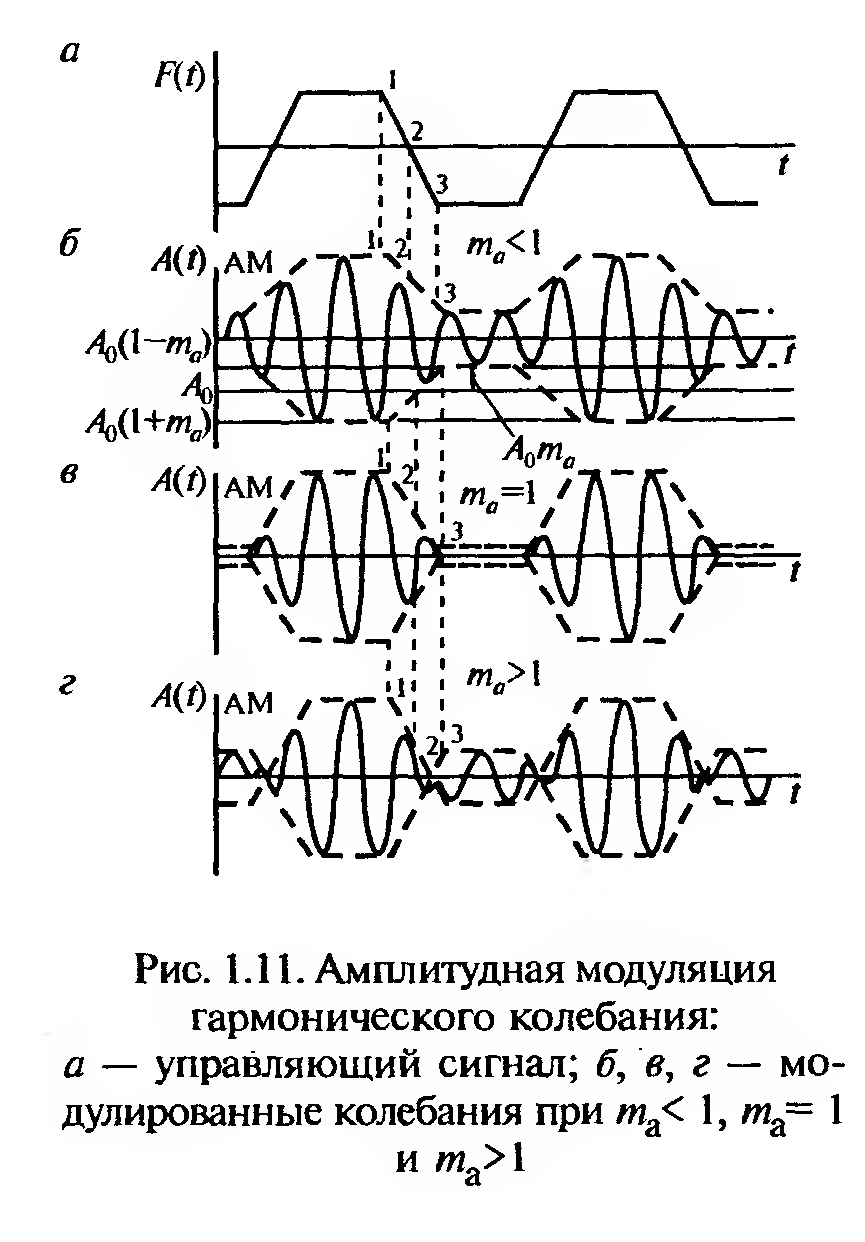
Амплитудная модуляция (AM) представлена на рис. 1.11. На рис. 1.11, а показан изменяющийся во времени сигнал F(t), который необходимо нанести на амплитуду A0 гармонического колебания, при этом амплитуда получит некоторое приращение ∆А.
Амплитуда
модулированного колебания равняется
![]() где
где
![]()
глубина
модуляции (рис. 1.11,6). Чтобы не произошло искажения передачи, прирашение ДА не должно быть больше A0. При ∆А — A0 имеем та= 1 (рис. 1.11, в). Дальнейшее увеличение ∆А приводит к тому что та> 1 (рис. 1.11, г), и при этом возникают искажения. Как видно из рис.1.11, амплитуда модулированного колебания меняется во времени по закону изменения сигнала F(f), наносимого на гармоническое колебание:
![]() (1,15)
(1,15)
Следовательно, модулированное колебание не является гармоническим и должно раскладываться на гармонические составляющие. Разложение АМ-колебаний в спектр
показывает, что в нем содержится несущее колебание с частотой ω0, а также колебания верхних и нижних боковых частот. В простейшем случае, если модуляция осуществляется синусоидальным низкочастотным сигналом с частотой Ω, в спектре имеется несущее колебание с частотой ω0 , верхняя боковая гармоника с частотой ω0+ Ω нижняя — с частотой ω0 + Ω
Для уменьшения полосы частот широко используют однополосную амплитудную модуляцию, при которой в канал связи передают только одну из боковых частот без несущей. Уменьшение полосы частот канала и повышение мощности гармоник, несущих информацию, позволяет повысить помехоустойчивость.
При частотной модуляции (ЧМ) по закону меняющегося сигнала F{t) изменяется частота несущего колебания:
![]() (1,16)
(1,16)
где ∆ω — девиация частоты, т.е. наибольшее отклонение ее от ω0 (обычно ∆ω<< ω0).
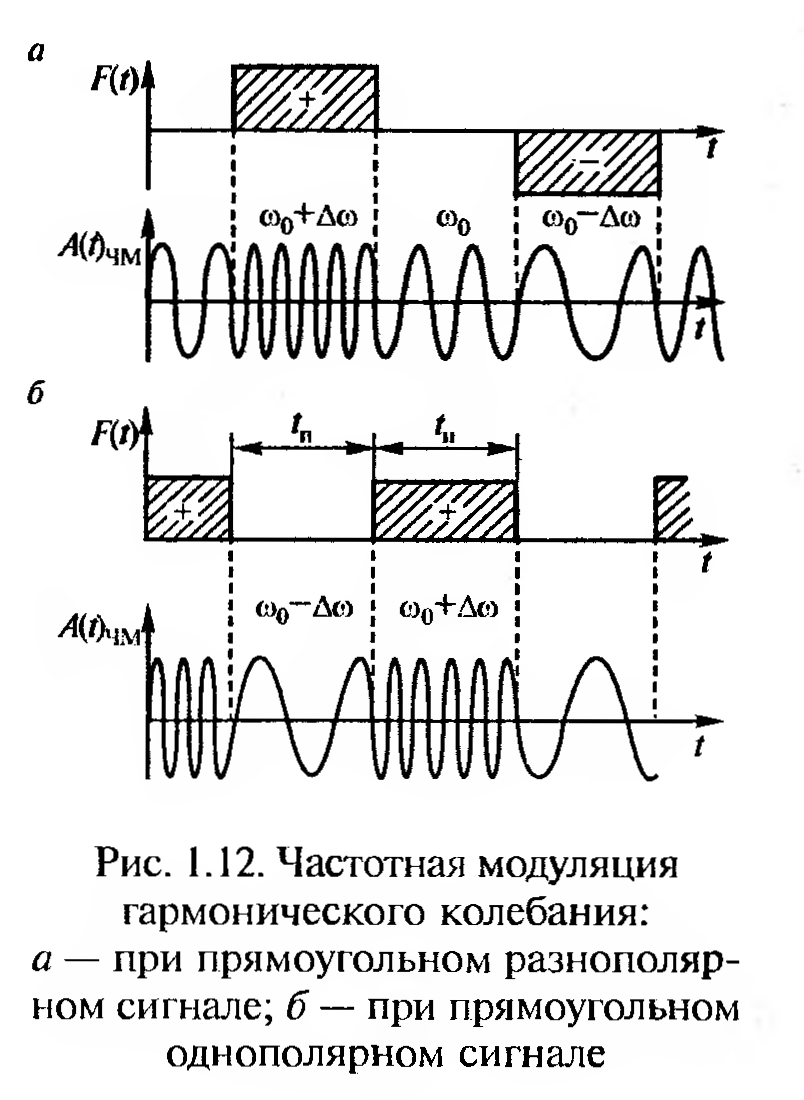
Наиболее наглядно можно представить частотную модуляцию при модулирующем сигнале в виде Последовательности разнополярных прямоугольных импульсов (рис. 1.12, а). В этом случае передаче положительного импульса соответствует частота ω0+∆ω, передаче отрицательного импульса — частота ω0 - ∆ω, а при паузе передается несущая частота ω0.
При передаче однополярных импульсов (рис. 1.12, б) импульс передается частотой ω0+∆ω, пауза — частотой ω0—∆ω. Несущая частота при передаче отсутствует, она равна средней арифметической между частотой импульса и паузы.
Спектр ЧМ-колебания состоит из гармоник несущей частоты и боковых полос (верхней и нижней). Число гармоник в каждой боковой полосе бесконечно даже при модуляции синусоидальным сигналом (в отличии от AM, при которой в этом случае имеется по одной боковой гармонике с каждой стороны). Полоса частот при ЧМ значительно шире, чем при AM, и это является недостатком ЧМ. Однако, при ЧМ обеспечивается существенно большая помехоустойчивость, чем при AM.
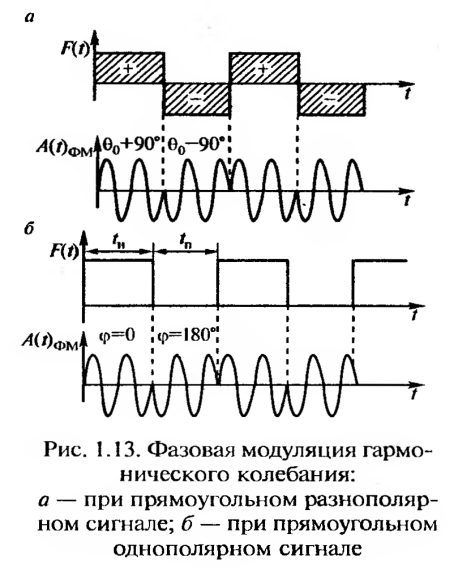
При фазовой модуляции (ФМ) по закону управляющего сигнала изменяется фаза несущего колебания. На рис. 1.13, а показана модуляция гармонического колебания разнополярным прямоугольным сигналом. Угол, на который изменяется фаза, называется углом модуляции, который на рис. 1.13, а составляет 180° (от ϴ0 +90° до ϴО —90°). При однополярных импульсах передаче импульса соответствует фазовый угол ᵠ = 0°, а паузе — ᵠ=180° (рис. 1.13, б)
Установлено, что при равной ширине полосы частот и скорости передачи наибольшую помехоустойчивость обеспечивает фазовая модуляция, наименьшую— амплитудная, частотная занимает промежуточное положение.
При импульсной модуляции в качестве несущего колебания используют периодическую последовательность импульсов. По закону изменения управляющего сигнала F(t) (рис. 1.14,о) модулируют один из параметров переносчика a(t) (рис. 1.14, б).
Различают следующие виды импульсной модуляции: амплитудно-импульсную (АИМ) (рис. 1.14, в); широтно-импульсную (ШИМ) (рис. 1.14, г); частотно-импульсную (ЧИМ) (рис. 1.14, д); фазо-импульсную (ФИМ) (рис. 1.14, ё); полярно-импульсную (ПИМ) (на рис. 1.14 отсутствует).
Частоту следования импульсов несущего колебания fи выбирают по теореме В.А. Котельникова, согласно которой число значений п модулирующего сигнала с шириной спектра ∆F, которое надо передать за время Т, определяется формулой:
n=2∆FT (1,17)
Отсюда следует:
![]() (1,18)
(1,18)
В этом случае трудно выделить сигнал из импульсно-модулированного колебания, так как наивысшая частота модулирующего и частота модулируемого колебаний очень близки по величине. Поэтому частоту модулируемого колебания выбирают в 2-3 раза больше, чем следует из выражения (1.18)
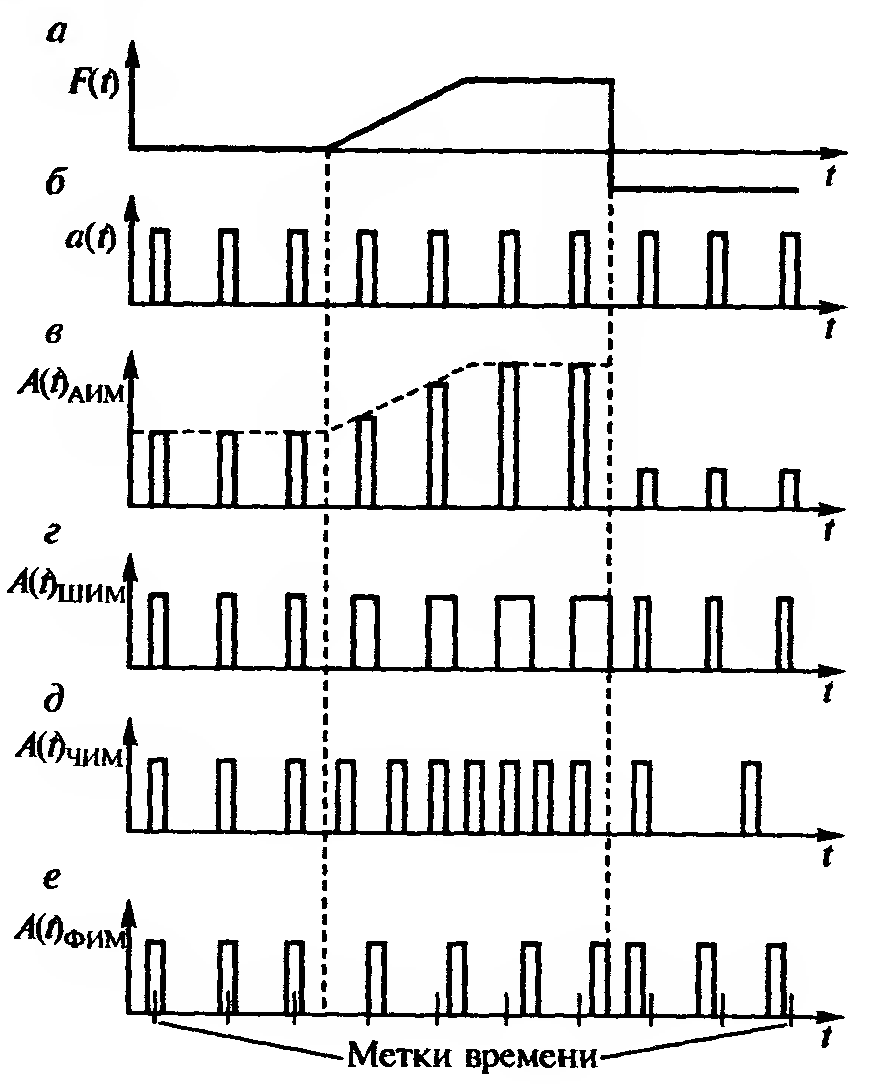
Рис. 1.14. Импульсная модуляция: а — управляющий сигнал; 6 — несущая последовательность импульсов; в, г, д, е — соответственно АИМ, ШИМ, ЧИМ и ФИМ
Кроме простых видов модуляции, рассмотренных выше, широко применяют и сложные, в которых одновременно осуществляется модуляция нескольких параметров или двух различных несущих колебаний (периодическая последовательность импульсов и гармоническое колебание). Например, АИМ-АМ представляет собой модуляцию управляющим сигналом по методу АИМ периодической последовательности импульсов, а полученным сигналом модулируется по амплитуде несущее гармоническое колебание.