

Динамический расчет системы.
Наиболее широкое применение при синтезе систем автоматического регулирования получил метод логарифмических частотных характеристик. Построение желаемой ЛАЧХ – выполняется на основе тех требований, которые предъявляются к проектируемой системе регулирования [7], а именно на основании времени переходного процесса и допустимого перерегулирования: tр и σ.
Вид и параметры корректирующего устройства определяются из следующего условия: если передаточная функция желаемой разомкнутой системы − Wж(p), передаточная функция нескорректированной системы – Wнс(p), а передаточная функция корректирующего звена последовательного типа – Wк(p), то можно записать равенство
![]()
откуда для ЛАЧХ корректирующего звена можно записать
![]()
По методике, описанной в [7] построим желаемую ЛАЧХ: сначала строится среднечастотный участок на основании заданных tp и σ, а затем достраиваются участки низкой и высокой частоты.
Среднечастотная часть ЛАЧХ имеет наклон -20дБ/дек и пересекает ось частот в точке с частотой ωн=(0,6…0,9)∙ωп, где ωп – частота найденная из [6] по заданной tp. ωп=3∙π/tp, откуда ωп=31,4 c-1.
Примем ωс=0,7∙ωп≈21,98 с-1.
По σ находим величины L1=|L2|, которые ограничивают среднечастотный участок.
Участки низкой и высокой частоты имеют наклон равный наклону нескорректированной системы.
Вид желаемой ЛАЧХ показан на рис. 12. Вид ЛАЧХ нескорректированной системы показан на рис. 10(б).
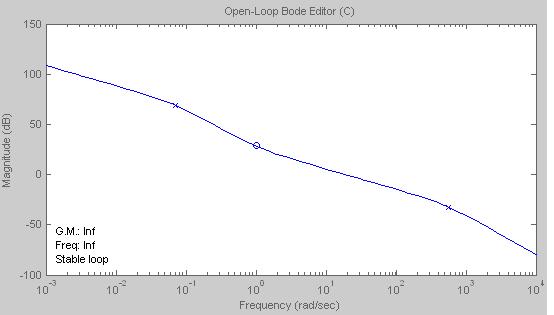
Рис. 12 Вид ЛАЧХ желаемой системы.
Желаемая передаточная функция системы имеет вид:

Сопоставляя ПФ желаемой системы и нескорректированной системы, получим Т3=Тд=0.0403 с.
По методике, описанной в [7] найдем параметры передаточной функции желаемой системы: T1=14,13, T2=1, T4=0.00178 с.
Переходная характеристика замкнутой системы с единичной отрицательной обратной связью, соответствующей ПФ разомкнутой системы Wж(p) приведена на рис. 13.


Рис. 13 Переходная характеристика желаемой системы.
Система слежения имеет структуру, представленную на рис. 14.

Рис. 14 Структурная схема СС.
Рассчитаем параметры корректирующего устройства. Как видно из рисунка:
Wж(р) = Wку(p)W(р),
где Wку(р) – передаточная функция корректирующего устройства.
Из последнего выражения следует, что Wку(р) = Wж(p)/W(р), воспользовавшись пакетом MatLab построим ЛАЧХ корректирующего устройства рис. 15.
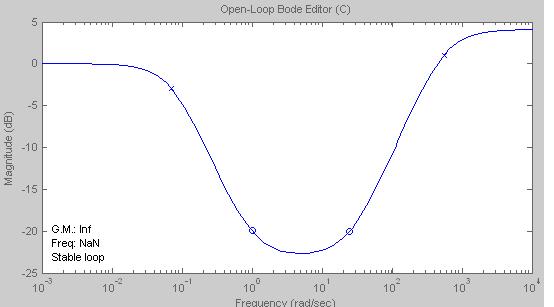
рис. 15 ЛАЧХ корректирующего устройства.
Передаточная функция корректирующего устройства имеет вид:
![]() .
.
Выбор корректирующего устройства.
Корректирующие устройства предназначаются для такого изменения структуры системы, при котором возможно получение нужных динамических свойств. Корректирующие устройства представляют собой динамические звенья различной физической природы со специально выбранными передаточными функциями.
Необходимую
нам передаточную функцию Wку(p)
можно получить при последовательном
соединении двух устройств с передаточными
функциями
 и
и
 .
Выберем из [7]
корректирующие устройства представленные
на рис.16.
.
Выберем из [7]
корректирующие устройства представленные
на рис.16.


Рис. 16 Корректирующие устройства.
Однако последнее устройство имеет нежелательный коэффициент усиления T4/T3<1. Это приводит к тому, что необходимо дополнительно поставить усилитель, компенсирующий этот коэффициент. Таким образом, усилитель будет иметь коэффициент усиления (T4/T3)-1= 22.64.
Упрощенная схема корректирующего устройства примет вид, показанный на рисунке 17.

Рис. 17 упрощенная схема корректирующего устройства.
По [7] найдем параметры цепей, воспользовавшись системой MathCAD:
R1= 157 кОм, R2= 11,9 кОм, R3=158.6 кОм, R4=7,3 кОм;
С1=254 нФ, С2=83.7 мкФ.