

Определение передаточной функции двигателя и ее параметров. Структурную схему двигателя можно представить в следующем виде
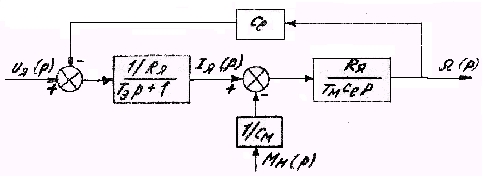
Рис 3 Структурная схема двигателя.
Здесь
Cе – коэффициент пропорциональности по противо-ЭДС;
СM – коэффициент пропорциональности по моменту.
Передаточные функции двигателя имеют вид [7]:

Рассчитаем коэффициент Cе:

Следовательно
![]()
Теперь определим коэффициент пропорциональности по моменту:
![]()
Вычислим коэффициент KM:

Найдем постоянную времени.

![]()
Подставив полученные значения, получим:
Передаточная функция по скорости и передаточная функция по моменту:
![]()
Выбор цифроаналогового преобразователя
В проекте будем использовать микросхему 8-разрядного быстродействующего ЦАП К1108ПА2, предназначенную для обработки высокочастотных сигналов. Эта микросхема может быть использована в телевизионных и радиолокационных системах, системах сбора и обработки данных в реальном масштабе времени, в измерительной аппаратуре и так далее. Конструктивно она выполнена в герметизированном металлокерамическом 33-выводном корпусе с двухсторонним вертикальным расположением выводов.
Микросхема К1108ПА2 построена на основе ЭСЛ структур и по выходным логическим уровням совместима с ТТЛ и ЭСЛ ЦИС. Микросхема способна выполнять функцию преобразования двоичного или биполярного прямого кода в выходное напряжение.

Обозначения выводов микросхемы:
Ucc1 – напряжение источника питания;
Ucc2 – напряжение источника питания;
UREF – опорное напряжение;
7 – выход;
10 – общий цифровой;
5, 6, 8 – общий аналоговый;
17 – вход С2;
20 – вход Н;
21 – вход L;
11 – прямой вход С;
12 – прямой вход G;
13 – инверсный вход C;
14 – инверсный вход G;
16, 19, 23, 25, 27, 29, 31, 33 – прямые цифровые входы;
15, 18, 22, 24, 26, 28, 30, 32 – инверсные цифровые входы;
Напряжение источника питания Ucc1 7 В;
Ucc2 -7 В;
Входное напряжение высокого уровня U1H -7 В;
Входное напряжение низкого уровня U1L 7 В;
Напряжение опорного источника –7 В UREF 7 В;
Общий –1 В UGND 1 В.
Разработка устройства управления исполнительным двигателем.
Техническое совершенство привода следящей системы с двигателем постоянного тока определяется усилителем мощности (УМ). В настоящее время применяют полупроводниковые транзисторные УМ. Транзисторные УМ работают в режиме класса Д с широтно-импульсной модуляцией (ШИМ) силовых транзисторов. Область применения транзисторных УМ расширяется и они вытесняют тиристорные преобразователи, что связано с освоением сильноточных транзисторов с коммутируемым током до 500 А и коллекторным напряжением до 700 В.
Схема УМ совместно со схемой управления показана на рис.5:
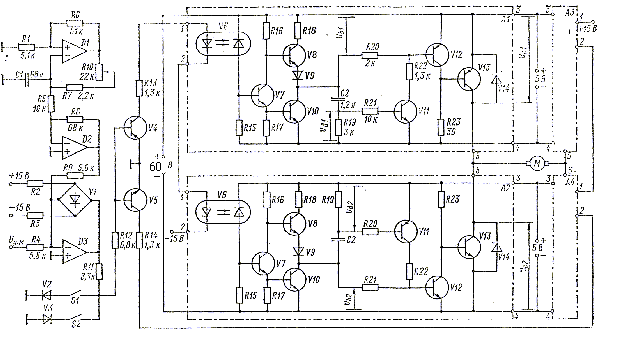
Рис.5 Принципиальная схема усилителя мощности.
Устройство состоит из генератора пилообразного напряжения, выполненного на операционных усилителях D1 и D2; двухпорогового компаратора D3 с диодным ограничителем V1; двухплечевого импульсного усилителя мощности на транзисторах V4 и V5; четырех плеч мостового усилителя: двух верхних А1 и А3 и двух нижних А2 и А4.
Верхнее плечо А1 (А3) состоит из оптронного усилителя типа 249ЛП1Б, выполненного на диодной оптопаре V6 и транзисторах V7, V8, V10; дифференцирующей RC-цепи на конденсаторе C2 и резисторе R19 с усилителем мощности дифференцирующего сигнала на транзисторе V11; управляющего транзистора V12 и силового транзистора V13 типа КТ865А.
Нижнее плечо А2 (А4) состоит из тех же элементов, что и верхнее, но отличается от верхнего местом подключения дифференцирующей RC-цепи и противоположным типом проводимости транзисторов V11-V13.
Помимо двух основных источников питания 60 В и 15В, УМ нуждается в двух дополнительных источниках напряжения 5В для схем управления нижними и верхними плечами моста.
Работу схемы поясняет диаграмма напряжений на рис.6 , где показаны а – пилообразное напряжение Uоп, снимаемое с Д2, входное напряжение Uу.м. и пороговое напряжение Uпор компаратора Д3; б – импульсное напряжение Uа, снимаемое с выхода компаратора Д3; в – выходное напряжение первого Ub1 и второго Ub2 оптронных усилителей; г – выходные напряжения первой Ud1 и второй Ud2 дифференцирующих RC-цепей; д, е, ж, з – коллекторные напряжения Uc1-Uc4 выходных транзисторов соответственно первого-четвертого плечей моста; u- выходное напряжение Uя на якоре двигателя.
П
Рис.6
![]() .
При этом в верхнем плече А1 транзистор
V12
закрыт, выходной транзистор V13
открыт током, протекающим через резистор
R23.
Выходной транзистор V13
нижнего плеча А2 будет закрыт. Состояние
левых плеч А1 и А2 усилителя не изменится
и при Ua<0,
так как их оптронные усилители включаются
напряжением Ua
отрицательной полярности. При Ua<0
выходные напряжения оптронных усилителей
.
При этом в верхнем плече А1 транзистор
V12
закрыт, выходной транзистор V13
открыт током, протекающим через резистор
R23.
Выходной транзистор V13
нижнего плеча А2 будет закрыт. Состояние
левых плеч А1 и А2 усилителя не изменится
и при Ua<0,
так как их оптронные усилители включаются
напряжением Ua
отрицательной полярности. При Ua<0
выходные напряжения оптронных усилителей
![]() .
При этом транзистор V13
верхнего плеча А1 будет закрыт, а V13
нижнего плеча А2 открыт. Импульс
напряжения, открывающий транзисторы
V13,
подается с задержкой времени относительно
импульса напряжения, снимаемого с выхода
соответствующего оптронного усилителя.
Эта задержка обеспечивается
дифференцирующими импульсами напряжений
Ud1
и Ud2.
Импульс напряжения Ud1
положительной полярности открывает
транзистор V11
нижнего плеча А2, оставляет открытым
транзистор V12,
задерживая тем самым включение транзистора
V13
нижнего плеча, пока транзистор V13
верхнего плеча не перешел в режим
отсечки. Время задержки определяется
постоянной времени дифференцирующей
цепи, которая выбирается несколько
больше времени запирания выходных
транзисторов. Так как выходные транзисторы
V13
при запирании шунтируются управляющими
транзисторами V12,
то время запирания и задержки получается
минимально возможным. Два других плеча
УМ А3 и А4 работают аналогично при
положительной полярности сигнала Uа
. Диаграмма выходного напряжения УМ
зависит от соотношения напряжений
.
При этом транзистор V13
верхнего плеча А1 будет закрыт, а V13
нижнего плеча А2 открыт. Импульс
напряжения, открывающий транзисторы
V13,
подается с задержкой времени относительно
импульса напряжения, снимаемого с выхода
соответствующего оптронного усилителя.
Эта задержка обеспечивается
дифференцирующими импульсами напряжений
Ud1
и Ud2.
Импульс напряжения Ud1
положительной полярности открывает
транзистор V11
нижнего плеча А2, оставляет открытым
транзистор V12,
задерживая тем самым включение транзистора
V13
нижнего плеча, пока транзистор V13
верхнего плеча не перешел в режим
отсечки. Время задержки определяется
постоянной времени дифференцирующей
цепи, которая выбирается несколько
больше времени запирания выходных
транзисторов. Так как выходные транзисторы
V13
при запирании шунтируются управляющими
транзисторами V12,
то время запирания и задержки получается
минимально возможным. Два других плеча
УМ А3 и А4 работают аналогично при
положительной полярности сигнала Uа
. Диаграмма выходного напряжения УМ
зависит от соотношения напряжений
![]() и
амплитуды пилы Uоп.
При Uу.м.=0
и
и
амплитуды пилы Uоп.
При Uу.м.=0
и
![]() c
выхода УМ снимаются симметричные
разнополярные импульсы с коэффициентом
заполнения
c
выхода УМ снимаются симметричные
разнополярные импульсы с коэффициентом
заполнения
![]() .
При этом крутизна статической
характеристики на начальном участке
.
При этом крутизна статической
характеристики на начальном участке
![]() будет вдвое выше, а коэффициент усиления
равен
будет вдвое выше, а коэффициент усиления
равен
![]()
Крутизну начального участка увеличивают для уменьшения напряжения трогания привода, повышая тем самым чувствительность системы у нуля.
Схема усилителя на рис.5 универсальная, так как она удовлетворяет всем требованиям, предъявляемым к УМ приводов следящих систем.
Отметим ее достоинства:
1) минимальные потери и максимальная частота ШИМ, обеспечиваемые шунтированием цепи база - эмиттер при запирании силовых транзисторов и использованием низковольтных источников в цепях управления;
2) симметрия верхнего и нижнего плеч усилителя с использованием одних и тех же однотипных элементов;
3) простая схема защиты от сквозного короткого замыкания, основанная на формировании импульсного сигнала в слаботочном участке схемы;
4) отсутствие влияния выходных каскадов на входную цепь благодаря их гальванической развязке;
5) простая схема ШИМ входного сигнала, основанная на использовании двух порогового компаратора;
6) безинерционность цепи управления;
7) наличие схемы ограничения движения привода (V2, V3, SI, S2)
8) обеспечение режима динамического торможения двигателя М, так как при Ua == 0 выходные транзисторы V13 верхних плеч А1 и A3 находятся в режиме насыщения;
9) отлаженная на определенную нагрузку схема не требует настройки последующих образцов.
Недостатком этой схемы является то, что требуется много источников питания ( 60 В , 15 В , 5 В ).
Параметры схемы на рис. 5 соответствуют току нагрузки 10 А при минимальном коэффициенте усиления по току транзисторов V13 b = 100.
Путем замены транзисторов V12 на составные транзисторы с коммутируемым током 1А выходной ток может быть увеличен до 100 А при соответствующем увеличении числа параллельно включенных транзисторов V13. Для дальнейшего увеличения тока нагрузки необходимо увеличить мощность сигнала, снимаемого с выхода оптронного усилителя. При переходе на более высокое напряжение питания усилителя требуется заменить выходные транзисторы V13 на высоковольтные.
Схема ограничения тока якоря двигателя
При разработке схемы управления двигателем постоянного тока следует предусмотреть возможность ограничения тока якоря двигателя [8].
Стабилизация момента двигателя в данной системе осуществляется с помощью обратной связи по току, обеспечивающей резкое снижение скорости двигателя при приблизительно постоянном моменте. Связь используется с отсечкой, задерживающей действие связи при низких нагрузках. Это обусловлено необходимостью защиты двигателя или механизмов от недопустимых перегрузок в статическом и динамическом режимах. Стабилизация момента в установившихся режимах необходима в приводе механизмов, работающих с резко переменной нагрузкой или на упор.
Отсечка осуществляется введением в цепь обратной связи опорного напряжения Uо.т. и вентилей V1 и V2 (рис.7), обеспечивающих действие связи только при превышении сигналом связи uт значения опорного напряжения (Uт > Uо.т.). Таким образом, ток отсечки определяется напряжением стабилизации стабилитронов.
Напряжение
отрицательной обратной связи по току
с отсечкой определится следующим
образом:
![]() ,
где
,
где
![]() - единичная функция по току, равная нулю
при i<iотс
и единице при iiотс.
- единичная функция по току, равная нулю
при i<iотс
и единице при iiотс.
Напряжение
![]() определяется как
определяется как
![]() В
данной схеме Rш
выбирается таким образом, чтобы не
оказывало существенного влияния на
динамику системы.
В
данной схеме Rш
выбирается таким образом, чтобы не
оказывало существенного влияния на
динамику системы.

Расчёт требуемых значений коэффициентов усиления разомкнутой системы и усилителя.
Для обеспечения заданной точности работы системы при заданном входном воздействии необходимо правильно рассчитать коэффициент усиления разомкнутой системы. Для его расчета используем методику, приведенную в [1]. Структурная схема системы изображена на рис. 8:

Рис. 8 Структурная схема системы.
В проектируемой системе имеется запаздывание в выдаче кода рассогласования, определяемое временем, необходимым для обработки кадра изображения цифровым вычислительным устройством и равным, как правило, интервалу времени между поступлением двух соседних кадров изображений.
Ввиду того, что частота поступления кадров равна 50Гц, будем считать Т = 1/50 = 0,02 с.
Выбранный для управления двигателем усилитель имеет крайне малую постоянную времени, поэтому можно считать его безинерционным, а передаточную функцию усилителя представить в виде коэффициента усиления Кус.
Перейдем от данной структуры цифровой следящей системы к эквивалентной непрерывной системе, представленной на рис. 9. Для этого заменим передаточную функцию квантователя на передаточную функцию безинерционного звена: 1/Т, где Т – период квантования. Так как частота формирования кадров изображения в нашем случае равно 50Гц, то Т = 1/50 = 0,02 с.

Рис. 9 Эквивалентная непрерывная система.
Передаточная функция непрерывной разомкнутой системы:

Коэффициент передачи редуктора:
![]()
Коэффициент передачи двигателя по скорости (найден ранее):
Кд = 4,255.
Коэффициент передачи двигателя по моменту (найден ранее):
Км = 1427,77.
Ошибка системы определится так:
![]()
где С0s = 0; С1s = 1/К; С2s = (Тд – 1/К)/К.
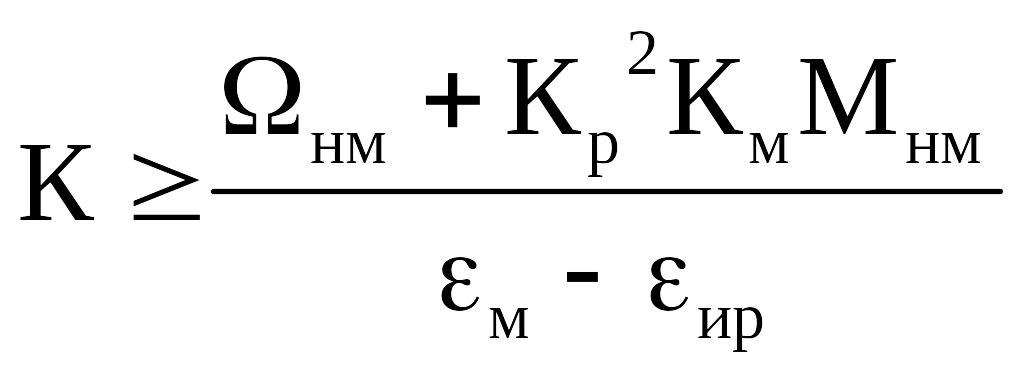
Рассмотрим ошибку системы при линейно изменяющемся задающем воздействии:
![]()
![]()
где m – допустимая ошибка следящей системы;
ир – элементная ошибка (ошибка рассогласования).
Погрешность измерителя рассогласования следует принять равной цене младшего разряда кода ошибки выраженного в угловых минутах:
![]()

Отсюда:
![]()
![]()
![]()
Таким образом, передаточная функция разомкнутой нескорректированной системы определится следующим выражением:
![]()
На рис. 10(а,б) представлены корневой годограф, ЛАЧХ и ЛФЧХ разомкнутой нескорректированной системы, построенные при помощи программы Matlab.
На рис. 11 изображена переходная характеристика замкнутой нескорректированной системы, которая носит сильно колебательный характер.

(а)
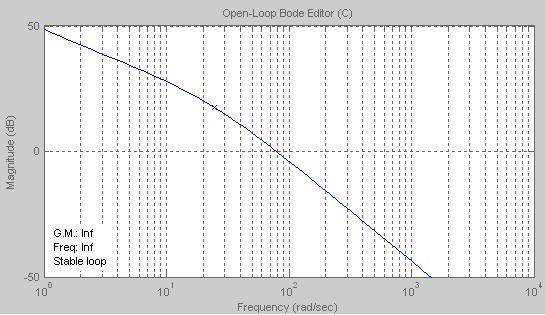
(б)
Рис. 10 Характеристики нескорректированной системы.
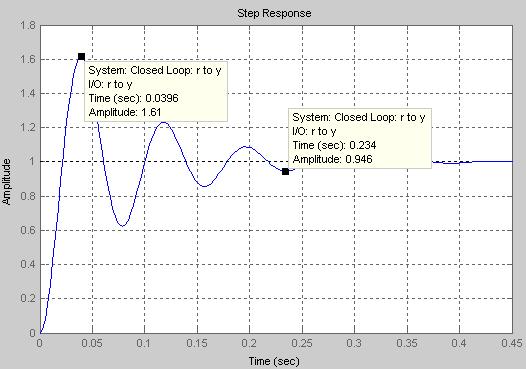
Рис. 11 Переходная характеристика нескорректированной системы.