

Введение
Курсовой проект по дисциплине «Проектирование систем автоматического управления» посвящен разработке следящей системы и включает в себя выбор основных элементов замкнутой системы регулирования, разработку принципиальной схемы управляющего устройства и электрический расчет основных ее узлов, синтез параметров следящей системы из условия обеспечения заданных точностных и качественных показателей ее работы, расчет показателей надежности системы.
В качестве объекта автоматизации выбран телевизионный комплекс, с помощью которого осуществляется слежение за наблюдаемой на экране монитора движущейся целью. Рассмотрение задач, решаемых данным комплексом, позволило выделить четыре различных режима работы следящего привода, которые явились основой разработки четырех тем курсового проекта.
Основой при выполнении курсового проекта являются конспект лекций по «Проектированию систем управления», знания, полученные студентами при изучении таких дисциплин, как «Элементы и устройства автоматики», «Электроника и микросхемотехника», «Теория автоматического управления».
Оптическая телевизионная система сопровождения цели
Современные технические комплексы характеризуются наличием ряда следящих приводов (СП), различных по назначению, но образующих единую систему управления объектом. Примером тому может служить оптическая телевизионная система (ОТС) сопровождения цели.
Задача, решаемая СТС, сводится к обеспечению вращения телевизионной камеры (ТК) (рис. 1) в азимутальной и угломестной плоскостях перемещения цели. Конструктивно телекамера закрепляется на платформе, имеющей две оси вращения и снабженной двумя СП. Данные СП обеспечивают вращение телекамеры по азимуту (ось I) и по углу места (ось 2). Работа следящих приводов должна быть направлена к тому, чтобы совместить оптическую ось телекамеры с направлением на цель. При таком совмещении на экране монитора, на который поступает сигнал изображения с телекамеры, изображение цели будет находиться в центре, что даст возможность или получить информацию о текущих координатах цели с датчиков углов поворота телекамеры (на рисунке не показаны), или организовать подсветку цели лазерным лучом прибора, направленным по оптической оси телекамеры. Вполне понятно, что механическая часть СТС должна располагаться на неподвижной несущей платформе, а в случае размещения СТС на подвижном объекте (корабле, самолете и т.п.) – на платформе, положение которой можно стабилизировать в плоскости горизонта.
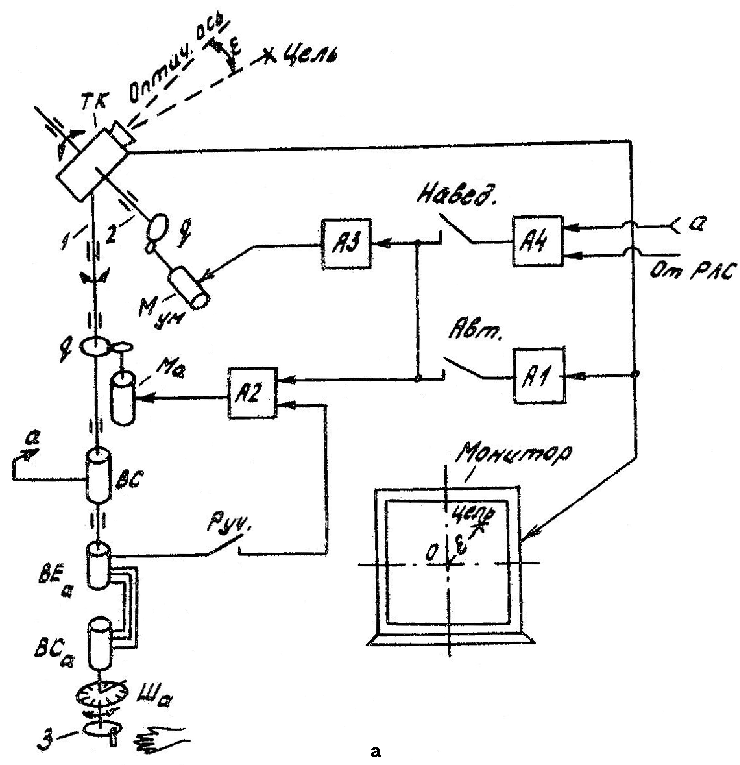

Рис.1 ОТС сопровождения цели.
Цифроаналоговая следящая система для автоматического сопровождения цели
Уже на этапе ручного сопровождения цели специализированное цифровое вычислительное устройство (ЦВУ) А1 (рис. 1,а) осуществляет обработку оцифрованного изображения телекамеры и по ряду признаков, отличающих движущийся объект (цель) от окружающего его фона, определяет элементы изображения, принадлежащие объекту, формируя тем самым «эталон» изображения объекта и корректируя его по необходимости.
Сформированный эталон изображения объекта используется на этапе автоматического сопровождения цели для нахождения местоположения объекта в каждом текущем изображении телекамеры, а следовательно, и выдачи в цифровой форме отклонения объекта от центра всего изображения (ошибки сопровождения). Информация об ошибке, преобразованная в аналоговый сигнал, поступает на входы усилителей А2 и А3, которые управляют работой исполнительных двигателей Ма и Мум. Исполнительные двигатели вращают телекамеру в сторону уменьшения ошибки сопровождения, удерживая в установившемся режиме слежения объект в центре изображения.
Особенность данных следящих приводов заключается в том, что их замыкание происходит через пространство и цель, реальные задающая и исполнительная оси отсутствуют, а ошибка рассогласования определяется в виде разности угловых положений оптической оси телекамеры и направления на цель. Поэтому цифровой код рассогласования вырабатывается не с помощью датчиков угла, а цифровым устройством А1, ведущим обработку изображения с телекамеры. Другой особенностью является дискретный по времени характер информации о рассогласовании в системе, определяемый частотой формирования кадров изображений телекамерой ( в проекте следует принять частоту поступления кадров изображений, равную 50Гц). Кроме того, следует иметь в виду наличие запаздывания в выдаче кода рассогласования, определяемого временем, необходимым для обработки кадра изображения устройством А1 и равным, как правило, интервалу времени между поступлением двух соседних кадров изображений.