

1.4.4. Умови роботи електропривода в усталеному режимі
Головною ознакою роботи електропривода в усталеному режимі є сталість швидкості руху електродвигуна і виконавчого органа робочої машини. Це можливо лише за умови рівності приведеного до вала електродвигуна моменту опору робочої машини і обертового моменту електродвигуна: М = Мс.
У процесі роботи більшості робочих машин момент опору постійно змінюється. Електродвигуни мають унікальну здатність автоматично підтримувати рівновагу електромеханічної системи електропривода при зміні моменту опору. В електричних двигунах роль автоматичного регулятора виконує електрорушійна сила (EРC) двигуна.
Пояснимо це на прикладі роботи електропривода робочої машини, яка має незалежну від швидкості механічну характеристику; а функцію електродвигунового пристрою виконує асинхронний двигун (рис. 1.7).
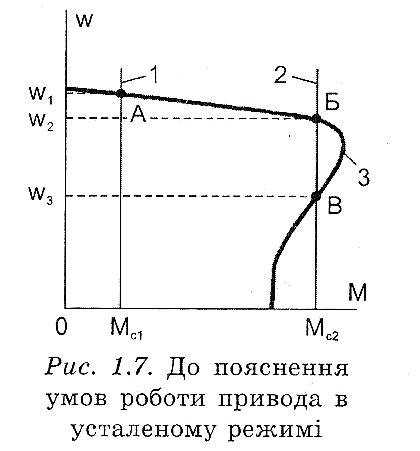
Характеристика 1 робочої машини відповідає моменту опору Мс , скажімо, на холостому ході. Умові М = Мс1, тобто усталеному режиму роботи, відповідає спільна для механічної характеристики 3 електродвигуна і для механічної характеристики 1 робочої машини точка А та швидкість 𝜔1.
При збільшенні навантаження (характеристика 2 робочої машини) швидкість електродвигуна зменшується, а електромагнітний обертовий момент двигуна зростає. Зростання моменту відбуватиметься доти, поки не настане рівновага моментів М = Мс2. Цьому новому усталеному режиму роботи електропривода відповідає точка Б і швидкість 𝜔2. Завдяки цьому електропривод й надалі стійко працюватиме за інших значень швидкості й моменту.
Стан усталеного режиму роботи електропривода, коли при зміні навантаження автоматично змінюється момент електродвигуна і швидкість обертання, називають статичною стійкостю. Умовою статичної стійкості електропривода є:
М/ 𝜔 – M 𝜔 < 0, (1.8)
або
 с<0.
(1.9)
с<0.
(1.9)
Умови (1.8) та (1.9) означають, що електропривод зберігатиме статичну стійкість, лише якщо за додатного приросту швидкості 𝜔 момент електродвигуна буде меншим моменту опору Мс і привод завдяки цьому загальмує до попереднього значення швидкості. За від'ємного приросту швидкості 𝜔 момент електродвигуна перевищуватиме момент опору Мс і привод завдяки цьому розженеться до попереднього значення швидкості.
Але можливий і такий стан, коли робота електромеханічної системи електропривода буде несталою, якщо умови (1.8) та (1.9) не виконуються. Прикладом цього може бути робота привода в точці В (рис. 1.7), коли навіть незначне відхилення швидкості призводить до того, що привод не повертається в точку усталеного режиму. Найчастіше при проектуванні електропривода механічна характеристика робочої машини є заданою. Для того щоб забезпечити усталений режим роботи електропривода в заданому діапазоні зміни моменту опору, потрібно правильно вибрати електродвигун (його механічні характеристики мають відповідати механічним характеристикам робочої машини). Цьому питанню буде присвячено окремий розділ посібника.
1.4.5. Рівняння руху електропривода
Крім розглянутих у попередньому параграфі умов усталеного режиму роботи електропривода, актуальними є також умови роботи електропривода в перехідних режимах.
Перехідним режимом роботи електропривода називають режим роботи при переході від одного усталеного режиму до іншого. Характерними прикладами роботи електропривода в перехідних режимах є пуск електропривода, гальмування, реверс (зміна напрямку руху), зміна навантаження і швидкості та інші, які відбуваються в нормальних режимах роботи і пов'язані з технологічним процесом робочої машини.
Перехідний режим роботи може мати місце також у результаті виникнення аварій, які призводять до негайних зупинок, або при порушенні нормальних умов електропостачання (наприклад, за зміни напруги або частоти, зникнення однієї з фаз живлення, несиметричності напруги тощо).
Рівняння руху електропривода в перехідному режимі має враховувати всі сили та моменти, які діють в електромеханічній частині електропривода.
При обертовому русі всіх складових механічної частини електропривода за умови, що момент інерції привода J є величиною постійною (це справедливо для значної більшості робочих механізмів), рівняння руху електропривода може бути записане так:
М –Мс= J(d𝜔/dt). (1.10)
Рівняння (1.10) показує, що електромагнітний обертовий момент М, створений двигуном, урівноважується моментом опору Мс на його валу і динамічним моментом J(d𝜔/dt). Проаналізуємо (1.10):
якщо М > Мс, то d𝜔/dt > 0 і має місце прискорення привода;
якщо М < Мс, то d𝜔/dt < 0 і має місце уповільнення привода;
якщо М = Мс, то d𝜔/dt = 0 і привод працює в усталеному режимі.
Момент двигуна М вважається додатним і у формулі (1.10) записується зі знаком плюс, якщо він спрямований в сторону руху привода. Якщо ж він спрямований в сторону, зворотну руху привода, то вважається від'ємним і у формулі (1.10) записується зі знаком мінус.
Знак «мінус» перед значенням моменту опору Мс у формулі (1.10) означає його гальмівну дію і зворотний напрямок по відношенню до швидкості 𝜔, а знак «плюс» означає, що він допомагає прискоренню привода.
Динамічний момент J(d𝜔/dt)має місце лише під час перехідного процесу, його величина і знак визначаються алгебраїчною сумою моментів двигуна М та опору робочої машини Мс .
З урахуванням усього зазначеного рівняння руху електропривода в загальному випадку може бути записане таким чином:
 M
M
 (1.10а)
(1.10а)
Контрольні питання
З яких головних частин складається електропривод робочої машини та яке його призначення?
Що мають спільного і чим відрізняються структурна та функціональна електричні схеми?
Яку інформацію дають принципові електричні схеми?
Проаналізуйте електричні схеми з'єднань, підключень, загальну схему та схему розміщень.
Для чого виконується приведення реальних кінематичних схем до спрощених?
На основі чого виконується приведення моментів, сил і мас від однієї осі до іншої?
На основі якого рівняння і яким чином класифікуються механічні характеристики робочих механізмів?
За яким показником здійснюється класифікація механічних характеристик електродвигунів? Наведіть її.
За яких умов електропривод працює в усталеному режимі?
Проаналізуйте рівняння руху електропривода.
Розділ 2
Основні положення про електричні
апарати загального призначення в електроприводах робочих машин