

1.4.2. Механічні характеристики робочих механізмів
Для правильного проектування та економічної експлуатації електропривода важливе значення має узгодження механічних характеристик робочого механізму та електродвигуна.
Залежність між приведеними до вала двигуна параметрами швидкості і моменту опору робочого механізму 𝜔 = f(Mc) називають механічною характеристикою робочого механізму.
Для кожного окремо взятого робочого механізму залежність 𝜔 = f(Mc) математично може бути описана по-своєму. Але можливе також використання єдиної формули, яка дозволяє зробити узагальнюючі висновки щодо механічних характеристик усіх робочих механізмів:
Мс
=М0
+ (Мс
мех
- М0) (1.6)
(1.6)
де
Мс
-
момент
опору робочої машини при швидкості
 ;
;
M0 - момент опору сил тертя в рухомих частинах;
Мс
ном
-
момент
опору робочої машини при номінальній
швидкості
 ;
;
х - показник степеня, що характеризує зміну моменту опору при зміні швидкості.
Згідно з формулою (1.6) механічні характеристики робочих машин класифікують таким чином (рис. 1.5):
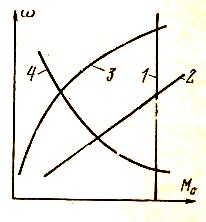 Рис.1.5.
Механічні
характеристикики
Рис.1.5.
Механічні
характеристикики
виробничих механизмів.
Незалежна від швидкості механічна характеристика (пряма 1). Для цієї характеристики х = 0, а момент опору Мс не залежить від швидкості. Такі механічні характеристики мають, наприклад: ланцюгові та стрічкові конвеєри, поршневі насоси за незмінної висоти подачі, значна частина металорізальних верстатів, підіймально-транспортні механізми (крани, тельфери, лебідки тощо).
Лінійно-зростаюча механічна характеристика (пряма 2). Для цієї характеристики х = 1, а момент опору М лінійно залежить від швидкості . Таку механічну характеристику має, наприклад, генератор постійного струму, який працює під постійним навантаженням.
З .Нелінійно-зростаюча механічна характеристика (крива 3). Для цієї характеристики х = 2, а момент опору Мс має квадратичну залежність від швидкості . Таку механічну характеристику мають відцентрові насоси, вентилятори, гребні гвинти та ін.
4. Нелінійно-спадна механічна характеристика (крива 4). Для цієї характеристики х = —1, а момент опору Мс знаходиться в оберненопропорційній залежності від швидкості . Таку механічну характеристику мають деякі металорізальні верстати (токарні, фрезерні і т.д.), вовнопрядильне обладнання, моталки в металургійній промисловості та ін.
Наведені чотири види механічних характеристик робочих механізмів не вичерпують усієї гами можливих характеристик, але дають уявлення про найбільш поширені серед них.
1.4.3. Механічні характеристики електродвигунів
Механічною характеристикою електродвигуна називають залежність швидкості обертання вала двигуна від електромагнітного обертового моменту
𝜔 = f(M). Для більшості видів електродвигунів характерною ознакою є зменшення швидкості обертання вала двигуна зі збільшенням моменту. Тому одним із показників для механічних характеристик електродвигунів є жорсткість механічної характеристики — відношення різниці електромагнітних моментів, які розвиває електродвигун, до відповідної різниці швидкостей:
 =
(М2
-
М1)/(𝜔2
–
𝜔1)
=
=
(М2
-
М1)/(𝜔2
–
𝜔1)
=
 М/
𝜔.
(1.7)
М/
𝜔.
(1.7)
Згідно з формулою (1.7) механічні характеристики електродвигунів класифікують таким чином (рис. 1.6)
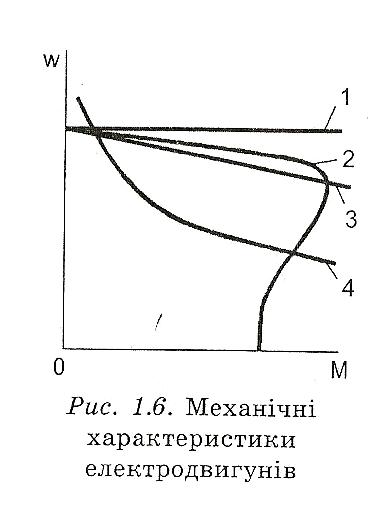
1. Абсолютно жорстка механічна характеристика (пряма 1). Таку характеристику мають синхронні електродвигуни. У них швидкість обертання вала не залежить від величини моменту, якщо він не перевищує певного критичного значення.
2. Жорстка механічна характеристика. Таку характеристику мають двигуни постійного струму з незалежним і паралельним збудженням (пряма 3). Асинхронні двигуни в межах робочої частини мають також жорстку механічну характеристику (прямолінійна частина кривої 2). У таких електродвигунів швидкість обертання вала зменшується зі збільшенням моменту, але це зменшення не суттєве.
3. М'яка механічна характеристика. Таку характеристику мають двигуни постійного струму з послідовним збудженням (крива 4).
Двигуни постійного струму зі змішаним збудженням можуть мати механічну характеристику як жорстку, так і м'яку, залежно від того, яку частину від сумарного магнітного потоку створює послідовна, а яку - паралельна обмотки збудження.