

6.2.2. Спеціальні електричні апарати для автоматичного керування роботою насосів
До найважливіших параметрів, які підлягають контролю та регулюванню в системах транспортування рідин, належать рівень рідини в резервуарі, наявність потоку (струменя) рідини в трубопроводі, тиск рідини на різних ділянках магістралі.
Для контролю та автоматичного регулювання цих параметрів використовують спеціальні апарати, до яких можна віднести: реле тиску, реле струминне, поплавкові реле рівня рідини, реле контролю заливки, електродний датчик рівня рідини та ін.
Реле тиску використовують в насосних установках для контролю величини тиску рідини в розгалужених мережах на певних ділянках магістралі. Ці реле бувають з мембранною або трубчатою пружинами. Конструкція, принцип дії та виконувані функції реле тиску з трубчатою пружиною подібні до описаної в п. 6.2.1 (рис. 6.4).
Реле струминне використовують для контролю наявності потоку (струменя) рідини в трубопроводі або відповідності величини тиску рідини вимозі Р Рmin На практиці використовують різні конструкції реле струминного, одна з яких описана в п. 6.2.1 та наведена на рис. 6.5.
Поплавкові реле рівня рідини (рис. 6.6) використовують для контролю рівня (h) рідини в резервуарі та автоматичного підтримання його в інтервалі
h min h hmax
Поплавок 1 знаходиться або безпосередньо в резервуарі 10, рівень рідини в якому необхідно підтримувати, або в допоміжному баці, з'єднаному з резервуаром. Через барабани 4 перекинутий трос 5, до одного кінця якого прикріплений поплавок 1, а до іншого - грузило 9. На тросі закріплені упори 2 і 8. Положення упору 2 визначає максимальний (hmax), а упору 8 - мінімальний (h min. ) рівні води в резервуарі.
Трос
5
проходить
через отвори в коромислі 6.
Коли
рівень рідини досягає значення
h
=
hmin
упор
8
повертає
коромисло 6
так,
що замикаються електричні контакти 7,
що
зумовлює появу електричного сигналу
на вмикання насоса (Uвм).
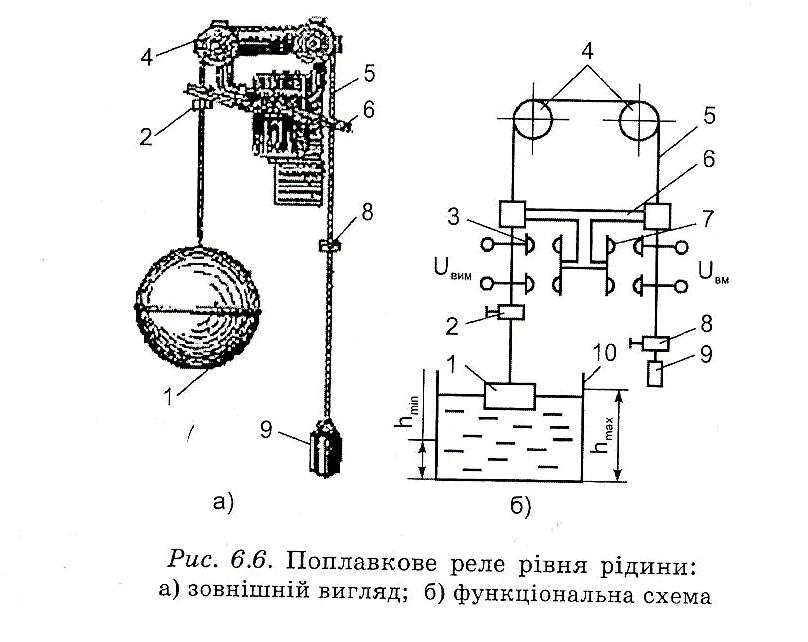
Відбувається наповнення резервуару рідиною доти, поки рівень рідини не досягне значення h = hmax. У цьому випад - і у упор 2 повертає коромисло 6 так, що розмикаються електричні контакти 3, що зумовлює появу електричного сигналу Uвим на вимикання насоса.
Реле контролю заливання відцентрових насосів дозволяє пуск лише заповненого водою насоса. Його також використовують як апарат аварійного захисту у випадках, коли в результаті прориву магістралі або протікання в самому насосі відбувається затоплення насосного приміщення.
У насосних установках використовують різні конструкції реле контролю заливання. Як приклад розглянемо конструкцію реле контролю заливання клапанного типу (рис. 6.7).
Вода,
що надходить у корпус 3,
піднімає
вгору клапан 4,
а
разом із ним шток 2
і
рухомі контакти 6.
Досягнувши
певного рівня, клапан 4
притискається
до ущільнюючої прокладки 5,
а
рухомі контакти 6
замикаються
з нерухомими 1.
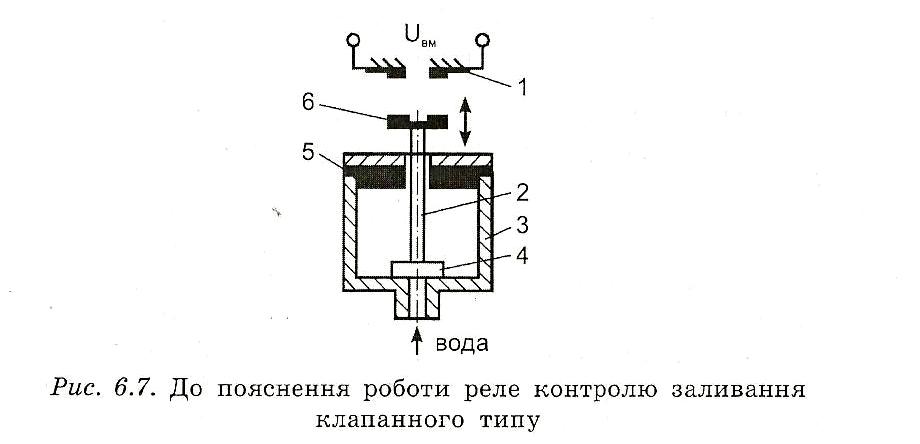
Лише в цьому випадку з'являється сигнал Uвм , який дозволяє вмикання насоса.
У системах контролю роботи відцентрових насосів також використовуються реле контролю заливання мембранного типу (рис. 6.8), які встановлюються на виході насоса. При заливанні насоса рідина заповнює корпус 4, мембрана 5 прогинається, переміщує шток 3 разом із рухомими електричними контактами 2, які при достатньому рівні заливання притискаються до нерухомих контактів 1, що забезпечує замикання. електричного кола для створення сигналу Uвм на дозвіл вмикання насоса.
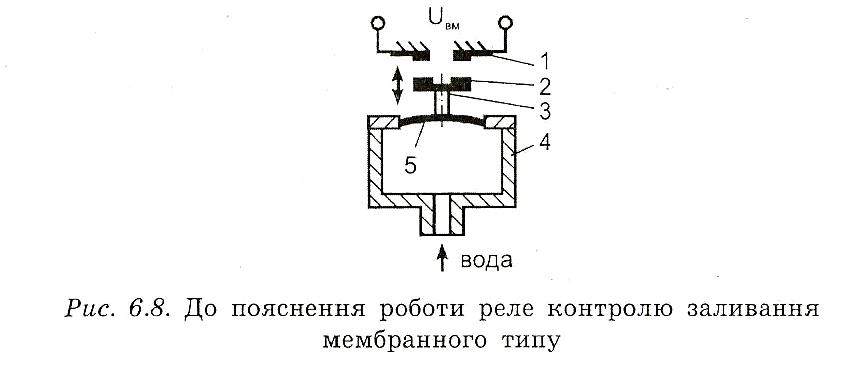
Перевагами такої конструкції реле є його висока чутливість, краща герметичність і здатність витримувати високі тиски.
Для виконання функції контролю заливання насоса можуть також використовуватися реле поплавкового типу.
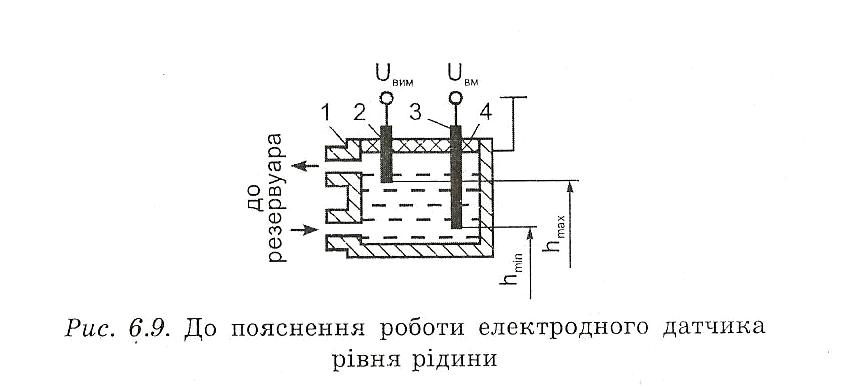
Електродне реле рівня рідини (рис. 6.9) використовують для контролю та автоматичного підтримання рівня електропровідних рідин у резервуарі. Корпус 1 реле з'єднують трубопроводами з резервуаром, у якому знаходиться рідина. Електродні контакти 2 і 3 закріплюються на ізоляційній основі 4.
При досягненні рідиною максимального рівня hmax електропровідна рідина контактує з електродним контактом 2 і з'являється електричний сигнал Uвим на вимикання насоса, а при досягненні мінімального рівня hmin електродний контакт 3 знаходиться вище рівня рідини в резервуарі. При цьому з'являється електричний сигнал Uвм на вмикання насоса.