

5.4. Реверс електропривода
Під реверсом розуміють зміну напрямку руху. В електроприводах робочих машин використовують як механічні, так і електричні способи реверсу виконавчого органа. У цьому розділі розглянемо лише питання, пов'язані з електричним реверсом.
В електроприводах з асинхронними двигунами з короткозамкненим та фазним ротором і з синхронним двигуном реверса досягають шляхом зміни чергування фаз напруги, що подається на обмотки статора, наприклад, чергування «АВС» змінюють на чергування «ВАС». Це приводить до зміни напрямку обертання магнітного поля статора і, відповідно, до зміни напрямку обертання ротора. Електрична схема реверсивного електропривода з асинхронним двигуном з короткозамкненим ротором буде розглянута в розділі 7 (рис. 7.5).
В електроприводах з двигуном постійного струму реверса можна досягти двома способами - або зміною полярності напруги джерела живлення (Uя), до якого підключене коло обмотки якоря, або зміною полярності напруги (Uя) на обмотці збудження (рис. 5.11).
5.5. Робота електропривода з постійною швидкістю
Необхідність підтримання постійної швидкості виконавчого органа робочої машини при зміні навантаження є вимогою багатьох технологічних процесів, для яких якість продукції чи продуктивність значною мірою залежать від стабільності швидкості. Прикладами таких робочих машин можуть бути автоматизовані лінії з нанесення різного роду покриття на вироби, фарбування, сушіння, намотування стрічкових виробів у рулони, механічної обробки виробів із великою площею та ін.
Як приклад розглянемо роботу схеми асинхронного електропривода для автоматичної стабілізації швидкості зміною напруги живлення двигуна (рис. 5.13).
Ж'ивлення схеми відбувається від трифазної мережі змінного струму.
Функцію електродвигунового пристрою в цьому електроприводі виконує трифазний асинхронний двигун із короткозамкненим ротором М.
Електрична схема має такі основні складові частини:
РН — регулятор напруги. Його завдання — автоматично змінювати напругу, що подається на двигун М, відповідно до зміни навантаження двигуна. На вхід РН подається незмінна трифазна напруга (U1 = const), а на виході має місце змінна трифазна напруга (U1 = var), величина якої зумовлена величиною сигналу Uпк ;
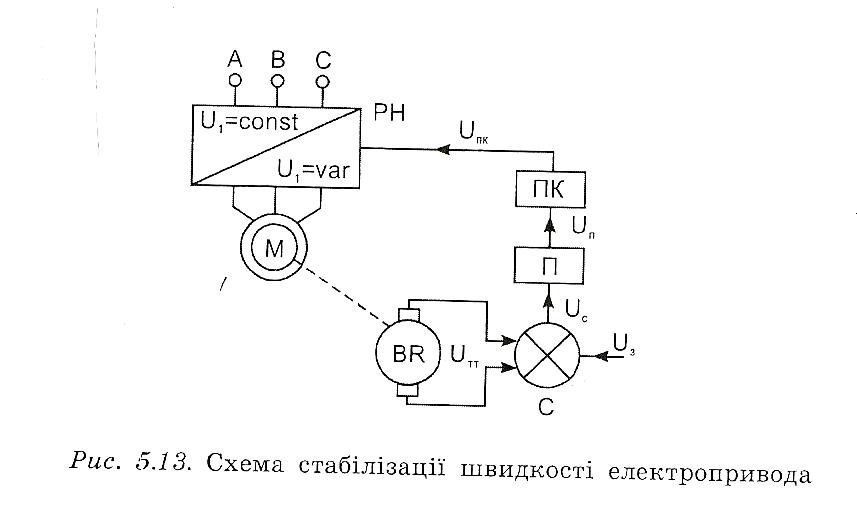
BR - тахогенератор, який виробляє електричний сигнал Uтг пропорційний до швидкості обертання ротора двигуна;
С - суматор, який виконує такі функції: на один із його входів подається електричний сигнал завдання Uз, величина якого зумовлює ту швидкість (п = const) двигуна, яку необхідно підтримувати постійною при зміні навантаження. На другий вхід подається сигнал Uтг , що відповідає дійсній швидкості двигуна. У суматорі відбувається порівняння цих сигналів, і на виході його маємо сигнал:
Uс = Uз - Uтг ;
П - підсилювач, що підсилює сигнал Uс до певної величини Uп , достатньої для керування роботою наступної складової частини - ПК;
ПК - пристрій керування, виробляє сигнал Uпк, який своєю дією на РН зумовлює необхідну зміну сигналу U1 = var.
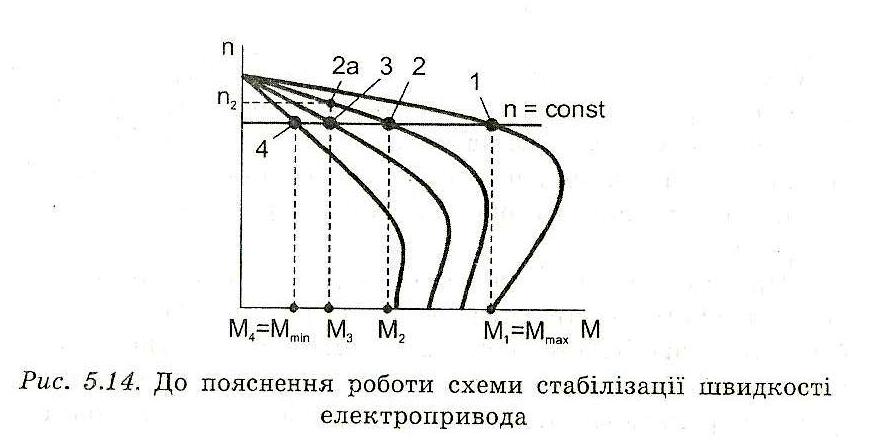
Схема працює таким чином. Якщо електропривод діє в сталому режимі, скажімо з моментом навантаження М2, то його робочою точкою на механічній характеристиці буде точка 2, яка відповідає частоті обертання п = const, обумовленій відповідним значенням Uз При цьому Uс = Uз - Uтг =0.
При
зменшенні навантаження до значення
М3
і за відсутності системи автоматичного
регулювання швидкості робочою точкою
була б точка 2а. Швидкість двигуна в
такому разі зросла б до значення
 ,.
Але завдяки системі автоматичного
регулювання цього не відбувається. Із
початком зростання швидкості обертання
двигуна збільшується і сигнал Uтг.
При цьому на виході суматора з'являється
сигнал Uс,
який
посилюється підсилювачем, а пристрій
керування виробляє такий сигнал
Uпк
,
під
дією якого регулятор напруги так
змінює сигнал
U1
=
var,
що
робочою точкою буде точка 3,
а
це, у свою чергу, забезпечує підтримання
стабільної швидкості електропривода
п
=
const.
,.
Але завдяки системі автоматичного
регулювання цього не відбувається. Із
початком зростання швидкості обертання
двигуна збільшується і сигнал Uтг.
При цьому на виході суматора з'являється
сигнал Uс,
який
посилюється підсилювачем, а пристрій
керування виробляє такий сигнал
Uпк
,
під
дією якого регулятор напруги так
змінює сигнал
U1
=
var,
що
робочою точкою буде точка 3,
а
це, у свою чергу, забезпечує підтримання
стабільної швидкості електропривода
п
=
const.
Ця схема автоматично забезпечує стабільність швидкості електропривода при зміні моменту навантаження в діапазоні від Мmin до Мmax
Контрольні питання
За яких умов можливий запуск електропривода?
Чим зумовлені вимоги до пускових струмів електродвигунів?
На що впливає час пуску електропривода?
Які шляхи подолання проблеми пуску електропривода ви знаєте?
Які переваги та недоліки має прямий пуск?
Дайте порівняльний аналіз способів пуску переключенням із «зірки» на «трикутник» та з допомогою автотрансформатора.
Які переваги та недоліки має гальмування на вибіг?
Як здійснюється динамічне гальмування?
Які недоліки та переваги гальмування противключенням?
Як можна регулювати швидкість електропривода з асинхронним двигуном з короткозамкненим ротором?
Чому швидкість асинхронного двигуна з фазним ротором регулюють на практиці лише зміною величини опору в колі обмотки ротора?
Як можна регулювати швидкість електропривода із синхронним двигуном?
Чому електропривод із двигуном постійного струму забезпечує найкращі можливості для регулювання швидкості?
Що таке реверс електропривода? Яким чином він здійснюється?
Розділ 6
Електропривод робочих машин для переміщення рідин і газів
До цієї групи робочих машин належать насоси, вентилятори, компресори, димососи, кондиціонери, холодильні установки та ін. Кожний вид робочих машин цієї групи має свої особливості, але вони мають також багато спільного, що дозволяє розглядати роботу їхніх електроприводів комплексно.