

5.3.2. Регулювання швидкості електропривода з асинхронним двигуном із фазним ротором
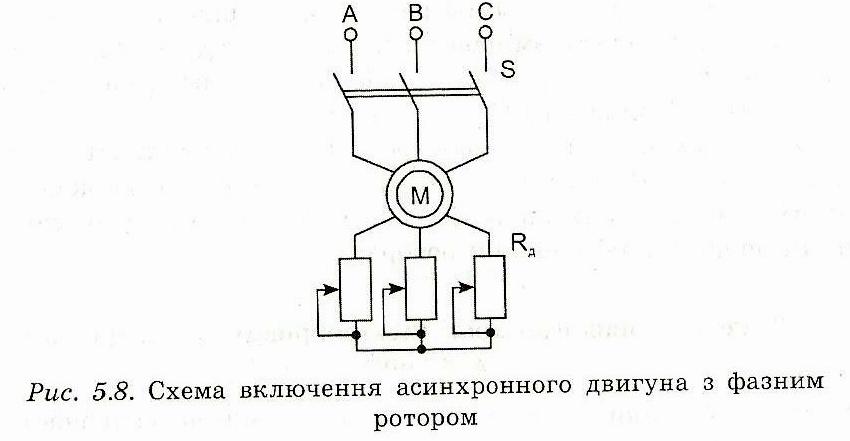
Частота обертання ротора асинхронного двигуна з фазним ротором визначається також за формулою (5.3). Для цього виду двигунів регулювати швидкість можна тими ж способами, що були описані в п. 5.3.1 для асинхронного двигуна з короткозамкненим ротором (зміною частоти напруги живлення, кількості пар полюсів та ковзання). Але на практиці для цих двигунів використовується лише один спосіб - шляхом зміни ковзання внаслідок зміни величини опору Rд реостатів, що вмикаються в коло обмотки ротора (рис. 5.8).
Зміною величини опору Rд досягається збільшення нахилу механічної характеристики двигуна, що забезпечує регулювання його швидкості від нуля до номінального значення (рис. 5.9).
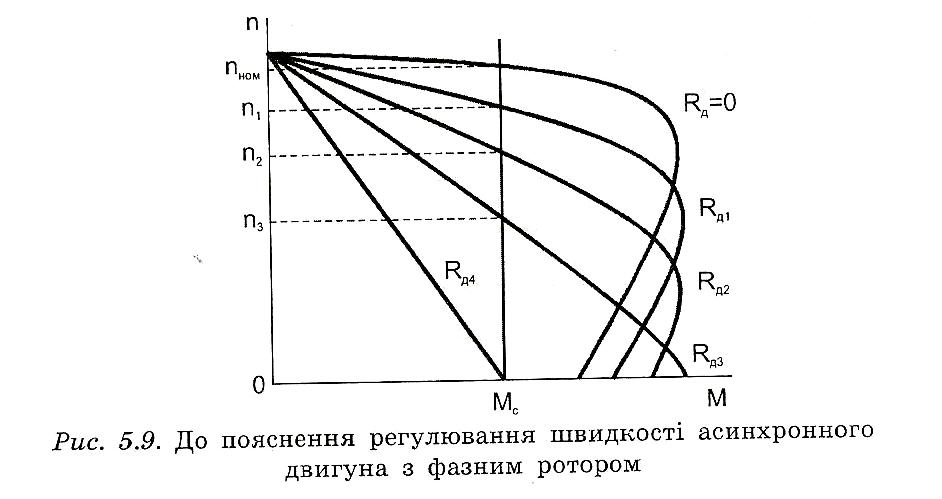
На практиці в електроприводах робочих машин регулювання швидкості таким способом частіше здійснюється ступенями, оскільки по обмотках ротора і по Rd проходять значні струми, тож використовувати пристрої, які б забезпечували плавну зміну величини опору Rd часто буває недоцільно.
До переваг цього способу регулювання швидкості можна віднести можливість змінювати швидкість від нуля до номінального значення, а також стабільність перевантажувальної здатності двигуна (Мmax = const).
Недоліками цього способу регулювання швидкості є великі втрати в Rd, а також необхідність використання допоміжних комутаційних апаратів, що забезпечують зміну величини опору в колі обмотки ротора.
5.3.3. Регулювання швидкості електропривода із синхронним двигуном
Частота обертання ротора синхронного двигуна визначається за формулою:
n
= (5.4)
(5.4)
Отже, регулювати швидкість синхронного двигуна можна двома способами: зміною кількості пар полюсів та зміною частоти напруги живлення. На практиці використовують лише другий спосіб, оскільки промисловість багатошвидкісних синхронних двигунів не виготовляє.
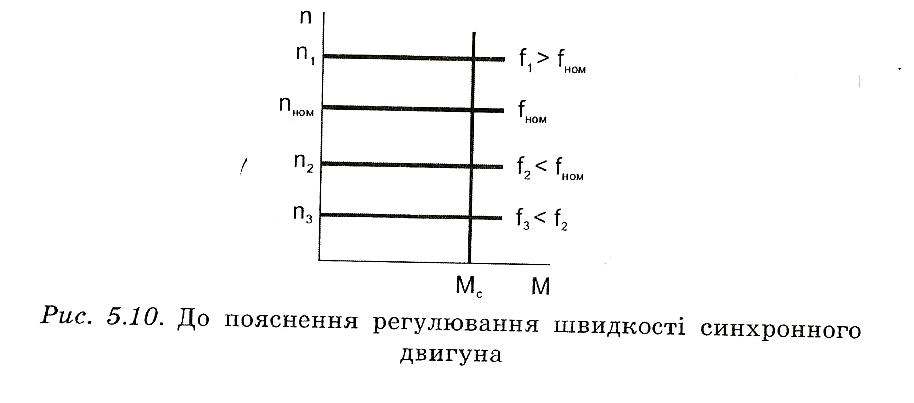
Найчастіше для зміни частоти напруги живлення в електроприводах робочих машин із синхронним двигуном використовують ТПЧ. Зміною частоти досягається пропорційна зміна частоти обертання синхронного двигуна (рис. 5.10).
Можливість плавного регулювання швидкості в широкому діапазоні (теоретично від нуля до номінального значення і вище) є перевагою цього способу. Але цей спосіб має також і ряд істотних недоліків, які вже розглядалися в п. 5.3.1.
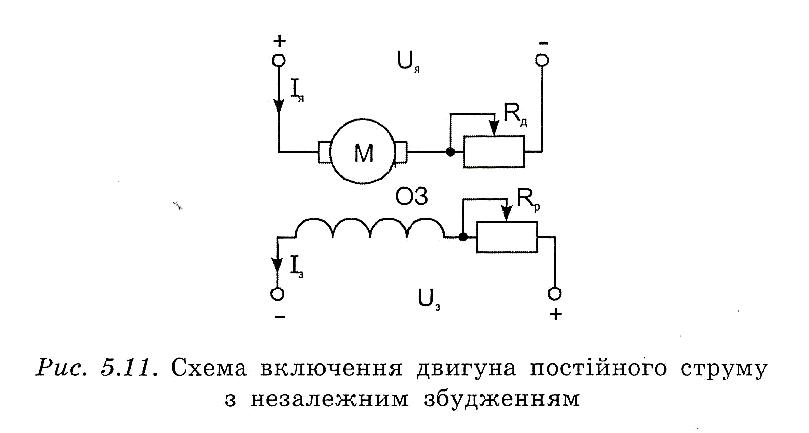
5.3.4. Регулювання швидкості електропривода з двигуном постійного струму
Це питання розглянемо на прикладі двигуна постійного струму з незалежним збудженням (рис. 5.11), частота обертання якоря п (об/хв) якого визначається за формулою:
n
=
 (5.5)
(5.5)
де
 -
напруга
джерела живлення, до якого підключене
коло обмотки якоря, В;
-
напруга
джерела живлення, до якого підключене
коло обмотки якоря, В;
 — струм,
що протікає в колі обмотки якоря, А;
— струм,
що протікає в колі обмотки якоря, А;
 -
опір
обмотки якоря, Ом;
-
опір
обмотки якоря, Ом;
 -
додатний
опір, що вводиться в коло обмотки якоря,
Ом;
-
додатний
опір, що вводиться в коло обмотки якоря,
Ом;
 —
конструктивна
стала машини;
—
конструктивна
стала машини;
Ф - магнітний потік, Вб.
Згідно з виразом (5.5), швидкість двигуна постійного струму можна регулювати за допомогою трьох параметрів:
напруги джерела живлення
 ,
до
якого підключене коло обмотки якоря.
Згідно з виразом (5.5)
зміна
зумовлює
прямо пропорційну зміну частоти
обертання якоря п
(рис. 5.12 а). Цей спосіб регулювання може
забезпечити плавне регулювання швидкості
в діапазоні від нуля до номінального
значення і вище;
,
до
якого підключене коло обмотки якоря.
Згідно з виразом (5.5)
зміна
зумовлює
прямо пропорційну зміну частоти
обертання якоря п
(рис. 5.12 а). Цей спосіб регулювання може
забезпечити плавне регулювання швидкості
в діапазоні від нуля до номінального
значення і вище;додатногб опору , що вводиться в коло обмотки якоря. Збільшення величини додатного опору зменшує жорсткість механічної характеристики (рис. 5.12 б) і зумовлює зниження швидкості обертання якоря. Цей параметр, за умови плавної зміни, дозволяє також плавно регулювати швидкість від нуля до номінального значення;
магнітного потоку Ф. На практиці магнітний потік найчастіше змінюють, регулюючи величину струму обмотки збудження Із за допомогою додатного опору Rp в колі обмотки збудження.
Оскільки при номінальному значенні магнітного потоку магнітна система машини знаходиться в насиченому стані, збільшувати магнітний потік вище номінального значення неефективно. Тому на практиці використовують регулювання швидкості з допомогою магнітного потоку лише в сторону його зменшення і цим, згідно з виразом (5.5), досягають збільшення швидкості від номінального значення і вище. Штучні механічні характеристики двигуна, отримані при Ф < Флоп показані на рис. 5.12 в.
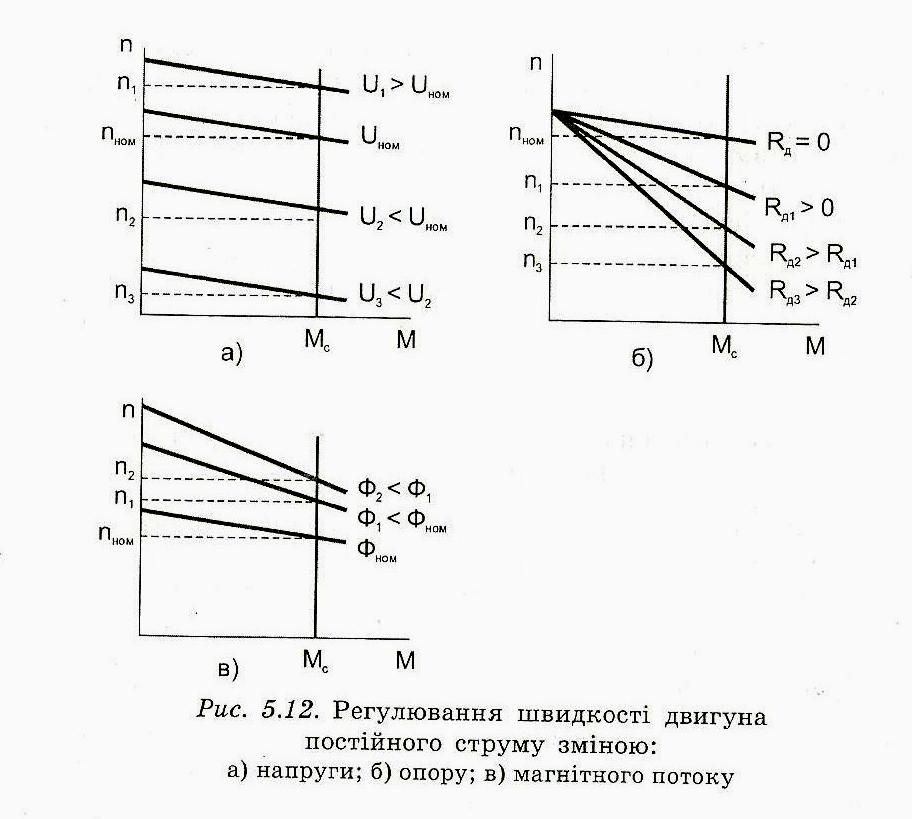
Аналізуючи сказане, можна дійти висновку, що електродвигуни постійного струму є найкращим видом електродвигунів щодо можливості регулювання швидкості. Вони забезпечують три простих у реалізації, ефективних і дешевих способи плавного регулювання швидкості в діапазоні від нуля до номінального значення і вище.